Tag Archives: vectors
 Last time I set the stage, the mathematical location for quantum mechanics, a complex vector space (Hilbert space) where the vectors represent quantum states. (A wave-function defines where the vector is in the space, but that’s a future topic.)
Last time I set the stage, the mathematical location for quantum mechanics, a complex vector space (Hilbert space) where the vectors represent quantum states. (A wave-function defines where the vector is in the space, but that’s a future topic.)
The next mile marker in the journey is the idea of a transformation of that space using operators. The topic is big enough to take two posts to cover in reasonable detail.
This first post introduces the idea of (linear) transformations.
Continue reading
13 Comments | tags: linear algebra, matrix transform, QM101, quantum mechanics, vector space, vectors | posted in Math, Physics
Whether it’s to meet for dinner, attend a lecture, or play baseball, one of the first questions is “where?” Everything that takes place, takes place some place (and some time, but that’s another question).
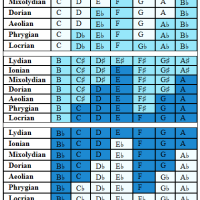
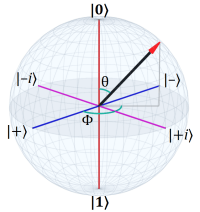
Where quantum mechanics takes place is a challenging ontological issue, but the way we compute it is another matter. The math takes place in a complex vector space known as Hilbert space (“complex” here refers to the complex numbers, although the traditional sense does also apply a little bit).
Mathematically, a quantum state is a vector in Hilbert space.
Continue reading
9 Comments | tags: coordinate system, inner product, QM101, quantum mechanics, vector space, vectors | posted in Math, Physics
 I’d planned a different first post for May Mind Month, but a recent online conversation with JamesOfSeattle gave me two reasons to jump the gun a bit.
I’d planned a different first post for May Mind Month, but a recent online conversation with JamesOfSeattle gave me two reasons to jump the gun a bit.
Firstly, my reply was getting long (what a surprise), and I thought a post would give me more elbow room (raising, obviously, the possibility of dueling posts). Secondly, I found the topic unusual enough to deserve its own thread.
Be advised this jumps into the middle of a conversation that may only be of interest to James and me. (But feel free to join in; the water’s fine.)
Continue reading
55 Comments | tags: neuron, semantic vectors, vector space, vectors | posted in Computers, Philosophy, Science
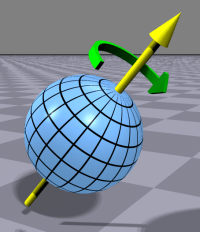 This is a Sideband to the previous post, The 4th Dimension. It’s for those who want to know more about the rotation discussed in that post, specifically with regard to axes involved with rotation versus axes about which rotation occurs.
This is a Sideband to the previous post, The 4th Dimension. It’s for those who want to know more about the rotation discussed in that post, specifically with regard to axes involved with rotation versus axes about which rotation occurs.
The latter, rotation about (or around) an axis, is what we usually mean when we refer to a rotation axis. A key characteristic of such an axis is that coordinate values on that axis don’t change during rotation. Rotating about (or on or around) the Y axis means that the Y coordinate values never change.
In contrast, an axis involved with rotation changes its associated coordinate values according to the angle of rotation. The difference is starkly apparent when we look at rotation matrices.
Continue reading
5 Comments | tags: 2D, 3D, 4D, column vector, matrix math, matrix transform, rotation, rotation matrix, unit vector, vectors | posted in Math, Sideband
In the last installment I introduced the idea of a transformation matrix — a square matrix that we view as a set of (vertically written) vectors describing a new basis for a transformed space. Points in the original space have the same relationship to the original basis as points in the transformed space have to the transformed basis.
When we left off, I had just introduced the idea of a rotation matrix. Two immediate questions were: How do we create a rotation matrix, and how do we use it. (By extension, how do we create and use any matrix?)
This is where our story resumes…
Continue reading
4 Comments | tags: 3Blue1Brown, column vector, linear algebra, matrix math, matrix multiplication, rotation, unit vector, vectors | posted in Math, Sideband
For me, the star attraction of March Mathness is matrix rotation. It’s a new toy (um, tool) for me that’s exciting on two levels: Firstly, it answers key questions I’ve had about rotation, especially with regard to 4D (let alone 3D or easy peasy 2D). Secondly, I’ve never had a handle on matrix math, and thanks to an extraordinary YouTube channel, now I see it in a whole new light.
Literally (and I do mean “literally” literally), I will never look at a matrix the same way again. Knowing how to look at them changes everything. That they turned out to be exactly what I needed to understand rotation makes the whole thing kinda wondrous.
I’m going to try to provide an overview of what I learned and then point to a great set of YouTube videos if you want to learn, too.
Continue reading
20 Comments | tags: 3Blue1Brown, column vector, complex numbers, linear algebra, matrix math, matrix multiplication, rotation, trigonometry, unit vector, vectors | posted in Math, Sideband
 Put on your arithmetic caps, dear readers. Also your math mittens, geometry galoshes and cosine coats. Today we’re venturing after numeric prey that lurks down among the lines and angles.
Put on your arithmetic caps, dear readers. Also your math mittens, geometry galoshes and cosine coats. Today we’re venturing after numeric prey that lurks down among the lines and angles.
There’s no danger, at least not to life or limb, but I can’t promise some ideas won’t take root in your brain. There’s a very real danger of learning something when you venture into dark territory such as this. Even the strongest sometimes succumb, so hang on to your hats (and galoshes and mittens and coats and brains).
Today we’re going after vectors and scalars (and some other game)!
Continue reading
16 Comments | tags: 2D, 3D, azimuth, coordinates, declination, dimensions, direction, elevation, location, scalars, speed, Technology, vectors, velocity | posted in Math

Throwing like a girl!
I’ve introduced the idea of an inertial frame of reference. This is when we, and objects in our frame, are either standing still or moving with constant (straight-line) motion. In this situation, we can’t tell if we’re really moving or standing still relative to some other frame of reference. In fact, the question is meaningless.
I’ve also introduced the idea that objects moving within our frame — moving (or standing still) along with us, but also moving from our perspective — move differently from the perspective of other frames. Specifically, the speed appears different.
Now I’ll dig deeper into that and introduce a crucial exception.
Continue reading
11 Comments | tags: Albert Einstein, Emmy Noether, Galilean invariance, Galileo Galilei, Mo'ne Davis, motion, scalars, Special Relativity, speed, vectors, velocity | posted in Physics
 Last time I talked about opposing pairs: Yin and Yang, light and dark, north and south. I mentioned that some pairs are true opposites of each other (for example, north and south), whereas other pairs are actually a thing and the lack of that thing (for example, light and dark). Such pairs are only opposites in the sense that an empty cup is the opposite of a full cup.
Last time I talked about opposing pairs: Yin and Yang, light and dark, north and south. I mentioned that some pairs are true opposites of each other (for example, north and south), whereas other pairs are actually a thing and the lack of that thing (for example, light and dark). Such pairs are only opposites in the sense that an empty cup is the opposite of a full cup.
However, in both cases, the opposites stand for opposing ideas; two poles of polarity, and it is polarization that I address today. Specifically, I want to discuss a way of thinking that helps avoid it.
It’s easy to divide the world into sides. Many sayings begin with, “There’s two kinds of…” It seems easier to break things down into opposing points of view than to consider a variety of views. It seems easier to compare features between two things than twenty. Our court system has two sides and so does our political system (despite many attempts to create a viable third party).
Continue reading
4 Comments | tags: debate, discussion, parameter space, thinking, vectors, worldview | posted in Basics, Philosophy