Category Archives: Sideband
 It’s been a while since my last Sidebands post. That’s partly because I’ve been working on a project that I’m sure will become a multi-post series and thought it would be nice to start with #81. But I’m not done (or actually started on the writing) yet, and this one has also been lurking for a while.
It’s been a while since my last Sidebands post. That’s partly because I’ve been working on a project that I’m sure will become a multi-post series and thought it would be nice to start with #81. But I’m not done (or actually started on the writing) yet, and this one has also been lurking for a while.
Essentially, I needed to figure out how to join a cone to a sphere in a seamless way (as in the picture here). This requires the sides of the cone meet the sphere at a tangent point.
It’s yet another case of actually needing the trigonometry I learned in school.
Continue reading
3 Comments | tags: cones, POV-Ray, trigonometry | posted in Math, Sideband
 You may remember learning way back in grade school that you can’t divide by zero. You may remember being told that division by zero is undefined. But have you ever wondered why we can’t divide by zero? Couldn’t the answer just be zero? We get zero when we multiply by zero, so why not when we divide?
You may remember learning way back in grade school that you can’t divide by zero. You may remember being told that division by zero is undefined. But have you ever wondered why we can’t divide by zero? Couldn’t the answer just be zero? We get zero when we multiply by zero, so why not when we divide?
But dividing is the opposite (or inverse) of multiplying, so if multiplying by zero gives zero, then maybe dividing by zero gives us… infinity? But infinity isn’t a number (it’s an idea), so that doesn’t work, either.
In this post I’ll dig into why division by zero is undefined.
Continue reading
4 Comments | tags: division, fractions, zero | posted in Basics, Math, Sideband

nx vs xn vs nx (for n=42)
You’ve probably heard the phrase “exponential growth” in reference to something that grows very fast. A common example is bacteria in a petri dish. More relevant in daily life, perhaps, the spread of a highly communicable disease or a “viral” meme. These things all can have exponential growth.
You may also have heard the phrase “geometric growth” and wondered how — if at all — it differs from the exponential form. Recently I found myself curious enough about the difference to dig into it a little and find out once and for all.
This post records my simple exploration.
Continue reading
3 Comments | tags: exponential function, geometric function, linear function | posted in Math, Sideband
 Long ago (in the first year of this blog), I posted Sideband #34: The North Star, which was about how sighting on the North Star (Polaris) gives you your latitude. Simply put, the elevation of the star is your latitude. My Twin Cities are at 45° north, so Polaris is 45° above my northern horizon. Simple!
Long ago (in the first year of this blog), I posted Sideband #34: The North Star, which was about how sighting on the North Star (Polaris) gives you your latitude. Simply put, the elevation of the star is your latitude. My Twin Cities are at 45° north, so Polaris is 45° above my northern horizon. Simple!
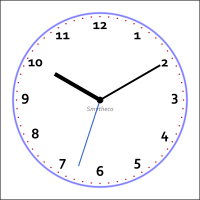
In this Sideband, I’ll explain how you can use your wristwatch as a compass. Assuming your watch is an analog one with hands. And assuming you can see the Sun (so this doesn’t work at night).
But, unlike North Star navigation, this one does work in the southern hemisphere.
Continue reading
9 Comments | tags: celestial navigation, Dick Francis, south, Sun, wearing a watch | posted in Basics, Sideband
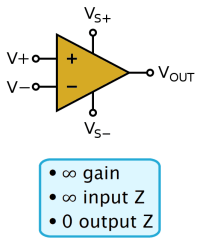 The last Sideband post (over eight months ago) was about Op Amps, mostly because I think they’re very cool but also easy to understand in the context of the Three Rules of Op Amps. [See this post and maybe the one before it.]
The last Sideband post (over eight months ago) was about Op Amps, mostly because I think they’re very cool but also easy to understand in the context of the Three Rules of Op Amps. [See this post and maybe the one before it.]
I posted about them in part because I also wanted to post about an electronics project I designed (but never built) back in the late 1980s. I thought it was a cool solution that leveraged existing infrastructure and used off-the-shelf parts.
Be advised this post is seriously on the electronics geek side and is mainly a memory with meaning only to me. I used to love designing stuff!
Continue reading
9 Comments | tags: electronics, field service technician, op amp, the past | posted in Sideband
Last November I posted about electronics “shortcuts” — rules of thumb that help interpret, even design, a circuit. These are approximations of more complex behavior but work well enough for a first cut at understanding a circuit.
Do not confuse these electronics shortcuts, which are generally good, with electronic short-circuits, which are almost always bad. While both offer shorter paths, that’s not a good thing in the latter case. Sometimes the journey is the only reward.
I intended to continue with op amps but kept putting it off. There are other Sidebands pending, though, so it’s time to drop the other shoe.
Continue reading
4 Comments | tags: electronics, op amp, operational amplifier | posted in Sideband
My notes don’t include what triggered the thought, but I think it was something in one of the Lee Smolin books I read recently. My recent post, Analog Computing, brought the idea to mind again, because analog computers often use op amps. I was reminded yet again while reading about SPADs.
I’m talking about the very useful rules of thumb (heuristics) I learned to help understand, even design, electronic circuitry. They’re shortcuts in the sense of being only approximately true, but their simplified view can make a circuit much easier to understand.
I thought I’d pass them on for those interested in electronic design.
Continue reading
8 Comments | tags: electrical current, electronics, transistor, voltage, volts | posted in Sideband
 I’ve always had a strong curiosity about how things work. My dad used to despair how I’d take things apart but rarely put them back together. My interest was inside — in understanding the mechanism. (The irony is that I began my corporate career arc as a hardware repair technician.)
I’ve always had a strong curiosity about how things work. My dad used to despair how I’d take things apart but rarely put them back together. My interest was inside — in understanding the mechanism. (The irony is that I began my corporate career arc as a hardware repair technician.)
My curiosity includes a love of discovery, especially unexpected ones, and extra especially ones I stumble on myself. It’s one thing to be taught a neat new thing, but a rare delight to figure it out for oneself. It’s like hitting a home run (or at least a base-clearing double).
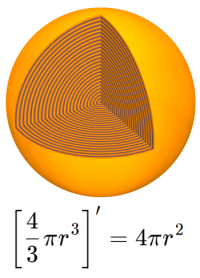
Recently, I was delighted to discover something amazing about spheres.
Continue reading
12 Comments | tags: derivatives, geometry, holographic principle | posted in Math, Sideband
 I’ve written a number of posts about four-dimensional Euclidean space, usually in the context of one of my favorite geometrical objects, the tesseract. I’ve also mentioned 4D Euclidean spaces as just one of many possible multi-dimensional parameter spaces. In both cases, the familiar 2D and 3D spaces generalize to additional dimensions.
I’ve written a number of posts about four-dimensional Euclidean space, usually in the context of one of my favorite geometrical objects, the tesseract. I’ve also mentioned 4D Euclidean spaces as just one of many possible multi-dimensional parameter spaces. In both cases, the familiar 2D and 3D spaces generalize to additional dimensions.
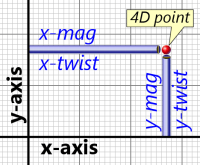
This post explores a specialized 4D space that uses complex numbers along each axis of a 2D nominally Euclidean space. Each X & Y coordinate has two degrees of freedom, a magnitude and a phase. This doesn’t make 4D spaces easier to visualize, but it can offer a useful way to think about them.
It also connects back to something I wrote about in my QM-101 series.
Continue reading
11 Comments | tags: 4D, complex numbers, complex plane | posted in Math, Sideband
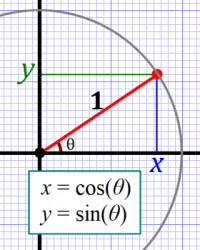 Trigonometry is infamously something most normal people fear and loath. Or at least don’t understand and don’t particularly want to deal with. (In fairness, it doesn’t pop up much in regular life.) As with matrix math, trig often remains opaque even for those who do have a basic grasp of other parts of math.
Trigonometry is infamously something most normal people fear and loath. Or at least don’t understand and don’t particularly want to deal with. (In fairness, it doesn’t pop up much in regular life.) As with matrix math, trig often remains opaque even for those who do have a basic grasp of other parts of math.
Excellent and thorough tutorials exist for those interested in digging into either topic, but (as with matrix math) I thought a high-altitude flyover might be helpful in pointing out important concepts.
The irony, as it turns out, is that trig is actually pretty easy!
Continue reading
31 Comments | tags: cosine, sine, sine wave, trigonometry | posted in Math, Sideband













