 I’ve always had a strong curiosity about how things work. My dad used to despair how I’d take things apart but rarely put them back together. My interest was inside — in understanding the mechanism. (The irony is that I began my corporate career arc as a hardware repair technician.)
I’ve always had a strong curiosity about how things work. My dad used to despair how I’d take things apart but rarely put them back together. My interest was inside — in understanding the mechanism. (The irony is that I began my corporate career arc as a hardware repair technician.)
My curiosity includes a love of discovery, especially unexpected ones, and extra especially ones I stumble on myself. It’s one thing to be taught a neat new thing, but a rare delight to figure it out for oneself. It’s like hitting a home run (or at least a base-clearing double).
Recently, I was delighted to discover something amazing about spheres.
I was reading Three Roads to Quantum Gravity (2001), by Lee Smolin, and he had a section on the holographic principle. Briefly, that’s the idea that the surface (or boundary) of a volume contains all possible information the volume can store. (See: BB #76: The Holographic Theory)
I’ve never been sure what to make of that idea, but I think it supervenes on the maximum possible density of a volume — which means we’re talking a black hole. Since there’s nothing inside a black hole other than the singularity, I think I can see how the surface might suffice to describe the entire volume (i.e. the singularity). If there is less than the max, then there is “extra” space on the surface to account for 3D distances.
The above from an argument involving a ray drawn from each Planck area on the surface — each possible information “pixel” — to the center. The rays, under the holographic principle, account for all possible information in the volume. But that suggests each ray can be only one bit of information. That only makes sense if the inside is empty except for the singularity.
§ §
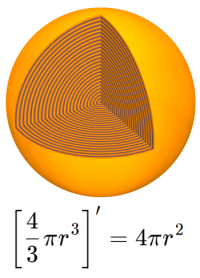
It got me thinking about the volume versus the surface area of a sphere. It’s really hard to see how the surface can contain all necessary information about the volume. The former famously grows as the square of the radius while the latter grows as its cube. Those two things are not the same!
So I’d written out, and was staring at, the formulae for the volume and for the surface area of a sphere:
![\displaystyle{V}=\frac{4}{3}\pi{r}^{3}\\[0.4 em]{SA}={4}\pi{r}^{2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%3D%5Cfrac%7B4%7D%7B3%7D%5Cpi%7Br%7D%5E%7B3%7D%5C%5C%5B0.4+em%5D%7BSA%7D%3D%7B4%7D%5Cpi%7Br%7D%5E%7B2%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
Looking at them together like that I noticed that the surface area is the derivative of the volume. “Well that’s odd,” I thought. A circle is a two-dimensional sphere, so I wondered if the same thing applied to circles.
I wrote out the formulae for a circle’s area and circumference:
![\displaystyle{A}=\pi{r}^{2}\\[0.4 em]{C}={2}\pi{r}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BA%7D%3D%5Cpi%7Br%7D%5E%7B2%7D%5C%5C%5B0.4+em%5D%7BC%7D%3D%7B2%7D%5Cpi%7Br%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
And, whoa, again the boundary of the space is the derivative of the enclosed space. (Turns out this is well-known to mathematicians, of course, but it was a discovery to me.)
§
If you remember anything from calculus, you likely remember derivatives:
A derivative is a function that gives the rate of change of another function.
The canonical example is that velocity is the derivative of distance over time, and acceleration is the derivative of velocity over time. (Which means acceleration is the second-derivative of distance over time.) Another common example is that the slope of a hill is the derivative of height over distance.
When we say something like distance over time, we mean a function that, given a timespan, returns a distance traveled. Mathematically:

Given function f, its derivative f’ (sometimes called g) takes the same time span and returns the change in distance, or velocity:

Given function f, then function f’ is its first derivative, function f” is its second derivative, and so on, each being the rate of change of the previous function. Sometimes g and h, respectively, are used for the first and second derivatives.
All that matters here is this simple rule:
![\displaystyle{f}={a}{x}^{e}\\[0.5 em]{f}'=({e}){a}{x}^{e-1}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7Bf%7D%3D%7Ba%7D%7Bx%7D%5E%7Be%7D%5C%5C%5B0.5+em%5D%7Bf%7D%27%3D%28%7Be%7D%29%7Ba%7D%7Bx%7D%5E%7Be-1%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
That is, given some function f with an exponential, its derivative multiplies the expression by the value of that exponential and then subtracts one from it. Here’s an example:
![\displaystyle{f}={3}{x}^{2}\\[0.5 em]{f}'=(2){3}{x}^{1}={6}{x}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7Bf%7D%3D%7B3%7D%7Bx%7D%5E%7B2%7D%5C%5C%5B0.5+em%5D%7Bf%7D%27%3D%282%29%7B3%7D%7Bx%7D%5E%7B1%7D%3D%7B6%7D%7Bx%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
Applying this rule to the volume equation for spheres — taking its derivative — gives the equation for surface area. That discovery surprised me; it’s not something I recall any math teacher or text mentioning.
Intriguing.
Put graphically, given some curve, its derivative is another curve showing the slope of the first curve. (See my Solar Derivative post for details.) That means a graph of the sphere’s surface area (over radius) is also a graph of the slope of the matching volume graph.
This applies to a circle’s area and parameter, too, so there is some universality. It’s a matter of interiors and boundaries; the latter somehow being the rate of change of the former.
Definitely intriguing.
§
The next obvious step, if it works with circles and spheres, does it also work with squares and cubes (and tesseracts)? Both circles and squares share a notion of being very symmetrical about the origin.
At first it looked like it was off by a factor of two. Here are the usual formulae for the area and parameter of a circle:
![\displaystyle{A}={s}^{2}\\[0.4 em]{P}={4}{s}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BA%7D%3D%7Bs%7D%5E%7B2%7D%5C%5C%5B0.4+em%5D%7BP%7D%3D%7B4%7D%7Bs%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
And for the volume and surface area of a cube:
![\displaystyle{V}={s}^{3}\\[0.4 em]{SA}={6}{s}^{2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%3D%7Bs%7D%5E%7B3%7D%5C%5C%5B0.4+em%5D%7BSA%7D%3D%7B6%7D%7Bs%7D%5E%7B2%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
For the square, we want the derivative of s2, which is 2s, not 4s for parameter length. Unfortunately, 4s is the correct formula.
For the cube we’d likewise want 3s2, not 6s2, but again the latter is the correct formula. Both of these are off by a factor of two.
Upon digging into this boundary-is-the-derivative-of-the-interior thing, I read that using an equivalent to radius makes it work. Normally (as seen above), the formulae use the length of the side. That would be like using the diameter of a circle or sphere. The equivalent to radius would be using d=s/2 — half the side length.
Now the (formula for the) boundary is the derivative of the (formula for the) interior:
![\displaystyle{A}={s}^{2}=({2}{d})^2={2}^{2}{d}^{2}={4}{d}^{2}\\[0.4 em]{P}={4}{s}={4}({2d})={4}({2}){d}={8}{d}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BA%7D%3D%7Bs%7D%5E%7B2%7D%3D%28%7B2%7D%7Bd%7D%29%5E2%3D%7B2%7D%5E%7B2%7D%7Bd%7D%5E%7B2%7D%3D%7B4%7D%7Bd%7D%5E%7B2%7D%5C%5C%5B0.4+em%5D%7BP%7D%3D%7B4%7D%7Bs%7D%3D%7B4%7D%28%7B2d%7D%29%3D%7B4%7D%28%7B2%7D%29%7Bd%7D%3D%7B8%7D%7Bd%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
Both with the square (above) and with the cube:
![\displaystyle{V}={s}^{3}=({2}{d})^{3}={2}^{3}{d}^{3}={8}{d}^{3}\\[0.4 em]{SA}={6}{s}^{2}={6}({2}{d})^{2}={6}({2}^{2}){d}^{2}={6}({4}){d}^{2}={24}{d}^{2}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%3D%7Bs%7D%5E%7B3%7D%3D%28%7B2%7D%7Bd%7D%29%5E%7B3%7D%3D%7B2%7D%5E%7B3%7D%7Bd%7D%5E%7B3%7D%3D%7B8%7D%7Bd%7D%5E%7B3%7D%5C%5C%5B0.4+em%5D%7BSA%7D%3D%7B6%7D%7Bs%7D%5E%7B2%7D%3D%7B6%7D%28%7B2%7D%7Bd%7D%29%5E%7B2%7D%3D%7B6%7D%28%7B2%7D%5E%7B2%7D%29%7Bd%7D%5E%7B2%7D%3D%7B6%7D%28%7B4%7D%29%7Bd%7D%5E%7B2%7D%3D%7B24%7D%7Bd%7D%5E%7B2%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
This extends to the tesseract:
![\displaystyle{V}={s}^{4}=({2}{d})^{4}={2}^{4}{d}^{4}={16}{d}^{4}\\[0.4 em]{SA}={8}{s}^{3}={8}({2}{d})^{3}={8}({2}^{3}){d}^{3}={64}{d}^{3}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%3D%7Bs%7D%5E%7B4%7D%3D%28%7B2%7D%7Bd%7D%29%5E%7B4%7D%3D%7B2%7D%5E%7B4%7D%7Bd%7D%5E%7B4%7D%3D%7B16%7D%7Bd%7D%5E%7B4%7D%5C%5C%5B0.4+em%5D%7BSA%7D%3D%7B8%7D%7Bs%7D%5E%7B3%7D%3D%7B8%7D%28%7B2%7D%7Bd%7D%29%5E%7B3%7D%3D%7B8%7D%28%7B2%7D%5E%7B3%7D%29%7Bd%7D%5E%7B3%7D%3D%7B64%7D%7Bd%7D%5E%7B3%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
And beyond. The sphere, likewise, extends to higher dimensions. For example, here are the formulae for a 4D sphere:
![\displaystyle{V}^{4}=\frac{1}{2}\pi^{2}{r}^{4}\\[0.4 em]{SA}={2}\pi^{2}{r}^{3}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%5E%7B4%7D%3D%5Cfrac%7B1%7D%7B2%7D%5Cpi%5E%7B2%7D%7Br%7D%5E%7B4%7D%5C%5C%5B0.4+em%5D%7BSA%7D%3D%7B2%7D%5Cpi%5E%7B2%7D%7Br%7D%5E%7B3%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
As a way to test your understanding, here are just the volume formulae for 5D and 6D spheres. See if you can figure the surface area formulae by doing their derivatives:
![\displaystyle{V}^{5}=\frac{8}{15}\pi^{2}{r}^{5}\\[1.0 em]{V}^{6}=\frac{1}{6}\pi^{3}{r}^{6}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%5E%7B5%7D%3D%5Cfrac%7B8%7D%7B15%7D%5Cpi%5E%7B2%7D%7Br%7D%5E%7B5%7D%5C%5C%5B1.0+em%5D%7BV%7D%5E%7B6%7D%3D%5Cfrac%7B1%7D%7B6%7D%5Cpi%5E%7B3%7D%7Br%7D%5E%7B6%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
Just use the simple rule from above.
§
Looking at other shapes, I realized spheres and cubes are special cases. In general this relationship doesn’t apply. A couple of cases come close or can be made to work with a concession.
For instance, the formulae for the volume and surface area of a cylinder are:
![\displaystyle{V}=\pi{r}^{2}{h}\\[0.4 em]{SA}={2}\pi{r}{h}+{2}\pi{r}^{2}={2}\pi{r}({h}+{r})](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%3D%5Cpi%7Br%7D%5E%7B2%7D%7Bh%7D%5C%5C%5B0.4+em%5D%7BSA%7D%3D%7B2%7D%5Cpi%7Br%7D%7Bh%7D%2B%7B2%7D%5Cpi%7Br%7D%5E%7B2%7D%3D%7B2%7D%5Cpi%7Br%7D%28%7Bh%7D%2B%7Br%7D%29+&bg=f9fbf9&fg=000080&s=0&c=20201002)
The first term is the derivative, but that second term is extra — its due to the surface area of the end caps. If the cylinder is open, however (no end caps), then the surface area of the tube is indeed the derivative of the volume it could contain.
This also works for a torus if R, the major axis, is taken as a constant:
![\displaystyle{V}=({2}\pi{R})(\pi{r}^{2})={2}\pi^{2}{R}{r}^{2}\\[0.5 em]{SA}=({2}\pi{R})({2}\pi{r})={4}\pi^{2}{R}{r}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%3D%28%7B2%7D%5Cpi%7BR%7D%29%28%5Cpi%7Br%7D%5E%7B2%7D%29%3D%7B2%7D%5Cpi%5E%7B2%7D%7BR%7D%7Br%7D%5E%7B2%7D%5C%5C%5B0.5+em%5D%7BSA%7D%3D%28%7B2%7D%5Cpi%7BR%7D%29%28%7B2%7D%5Cpi%7Br%7D%29%3D%7B4%7D%5Cpi%5E%7B2%7D%7BR%7D%7Br%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
And that’s about it. The trick apparently requires symmetry about the axes to work.
For instance, it doesn’t work with cones:
![\displaystyle{V}=\frac{1}{3}\pi{r}^{2}{h}\\[0.4 em]{SA}=\pi{r}\left[{r}+({h}^{2}+{r}^{2})^\frac{1}{2}\right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%3D%5Cfrac%7B1%7D%7B3%7D%5Cpi%7Br%7D%5E%7B2%7D%7Bh%7D%5C%5C%5B0.4+em%5D%7BSA%7D%3D%5Cpi%7Br%7D%5Cleft%5B%7Br%7D%2B%28%7Bh%7D%5E%7B2%7D%2B%7Br%7D%5E%7B2%7D%29%5E%5Cfrac%7B1%7D%7B2%7D%5Cright%5D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
Which are pretty simple shapes that do have symmetry along their length, but their surface area definitely isn’t the derivative of the volume. The derivative of that would be:

Which is rather different from the real formula. (It also assumes the height, h, is a constant.)
The ellipsoid seemed like a symmetrical shape, almost spherical-ish, but the surface area definitely isn’t the derivative of the volume:
![\displaystyle{V}=\frac{4}{3}\pi{a}{b}{c}\\[0.5 em]{SA}={4}\pi\left(\sqrt[5]{\frac{\left(\sqrt[3]{{a}{b}}\right)^{5}+\left(\sqrt[3]{{a}{c}}\right)^{5}+\left(\sqrt[3]{{b}{c}}\right)^{5}}{3}}\;\right)^{3}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BV%7D%3D%5Cfrac%7B4%7D%7B3%7D%5Cpi%7Ba%7D%7Bb%7D%7Bc%7D%5C%5C%5B0.5+em%5D%7BSA%7D%3D%7B4%7D%5Cpi%5Cleft%28%5Csqrt%5B5%5D%7B%5Cfrac%7B%5Cleft%28%5Csqrt%5B3%5D%7B%7Ba%7D%7Bb%7D%7D%5Cright%29%5E%7B5%7D%2B%5Cleft%28%5Csqrt%5B3%5D%7B%7Ba%7D%7Bc%7D%7D%5Cright%29%5E%7B5%7D%2B%5Cleft%28%5Csqrt%5B3%5D%7B%7Bb%7D%7Bc%7D%7D%5Cright%29%5E%7B5%7D%7D%7B3%7D%7D%5C%3B%5Cright%29%5E%7B3%7D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
(Yikes!) The variables a, b, and c, are the three radii. What’s interesting is that if a=b=c, the ellipsoid reduces to a sphere, and then the surface area should be the derivative of the volume.
Apparently the ellipticity is the issue. Although the ellipse has a (very simple) formula for area:

There isn’t one, certainly not a derivative, for the parameter. (Calculating that apparently requires doing an interval.)
§ §
 The obvious question is: What’s going on here?
The obvious question is: What’s going on here?
Actually, it does make sense.
Imagine you have a ball with radius r. It has a current volume, given by:

Now imagine we apply a thin coat of paint to the ball. Since the paint coat is thin, the amount of paint is essentially the surface area of the ball. Which is given by:

The new coat of paint increases the ball’s volume just slightly. The new volume is the old volume plus the paint — which we know is essentially the surface area. (As paint coat thickness approaches zero, the amount approaches the surface area exactly.)
So the growth rate of the ball is its current surface area. As the ball gets larger, the grow rate, of course, increases.
This logic works for spheres of all dimensions (including circles), and it also works for cubes of all dimensions (including squares). It also works with open cylinders and fix-radius torii, but so far that’s about it.
The more interesting question, I think, is why it fails in other shapes.
§
I took a look at the Platonic solids, and they don’t appear to follow the pattern. The math for surface area and volume is a bit more involved, but at first blush I’m not seeing the former as the derivative of the latter.
But cubes are one of the Platonic solids, so the math works for at least one of them. Perhaps it can be untangled to work with the others. On the other hand, the sphere being a special case of the ellipsoid (and circles being a special case of ellipses) didn’t seem to help with the elliptical case.
Obviously it requires a very simple relationship between the boundary and the interior. Spheres, cubes, tubes, and torii, are all very simple shapes. The key may be the number of parameters necessary to specify them. Spheres and cubes only need one, tubes and torii only need two. (But the Platonic solids all only need one, so maybe parameters isn’t key?)
§ §
All-in-all, an interesting problem to ponder. For me, in stumbling over it, it echoed the most common exclamation in science: “Huh! That’s weird!”
That has been the beginning of a whole lot of science!
Stay curious, my friends! Go forth and spread beauty and light.
∇












October 15th, 2021 at 8:34 am
A little math fun for a Friday! 😀
October 15th, 2021 at 12:13 pm
Here are the surface area equations for 5D and 6D spheres:
See the N-sphere Wiki page for details.
October 16th, 2021 at 10:38 am
(If you think this topic is obscure, wait until you see what’s coming. Lately I’ve been thinking about a hobby I moved on from long ago, electronics design and implementation. This blog is intended to be somewhat diary-like, my scrawl on the internet wall, so I’ve decided to document some of those old projects and write about electronics a bit.)
October 19th, 2021 at 11:06 am
Not at all related to the topic, but here’s a cool video I saw last night:
It really shows the effects of chaos. I’ve long wanted to do an animation of a pool table and the initial break by the cue ball. Two versions with a tiny, tiny variation in the initial settings for the cue ball. At first the two break animations look identical, but chaos causes them to diverge wildly. I’ve seen a version of this; always wanted to do my own hi-def one.
(See the videos in the Entropy Isn’t Fundamental! and Is Reality Determined? posts for a crude prototype of what I mean.)
October 19th, 2021 at 4:26 pm
Also completely unrelated to the post topic (other than being about math), I’ve never actually done the math, but last night I was thinking about E=mc² and wondering how to translate the mass of something into meaningful energy terms.
I started by looking up a paperclip to see if it really is a gram. According to most of the internet, yes, but it depends on the paperclip, some are more, some are less. I think it’ll have to be just a canonical paperclip that’s 1.0 grams (or 0.001 kg).
Speaking of kilograms, E=mc² uses them for the mass, m. The speed of light, c, is in meters/second (m/s), and c² is then in meters²/second² (m²/s²). When we multiply mass × c², we get a number with the units: kg·m²·s⁻² — which is the units for the energy value in joules.
Using the easy value for c, 3×10⁸, c² is 9×10¹⁶ m²·s⁻², and the paperclip value for m, 1×10⁻³, we have:
What is 9×10¹³ joules? Well, 1 ton of TNT is defined as 4.184 GJ (giga-joules), so:
In other words, 21 kilotons.
Which confirms what I’d always heard about Fat Man, the plutonium bomb we dropped on Nagasaki in 1945. Specifically, that only about a gram of the bomb’s fissile material was converted to energy, but that was enough for the 21 KT yield. (The Wiki page cites 88 terajoules as the energy, which matches the 90 TJ estimate I got, so my math is confirmed.)
October 20th, 2021 at 10:11 am
Another way to look at it is that one kilogram (~2.2 pounds), if completely converted to energy, amounts to 21 megatons. (An antimatter bomb with 1 kg of antimatter would be a 21 megaton device since all the antimatter necessarily gets converted to radiation energy — a whole lotta photons. And neutrinos and antineutrinos.)
October 21st, 2021 at 4:19 pm
Did a little more math, and that canonical paperclip, completely converted to its energy more peacefully amounts to 25,000,000 KW hours or 85,000,000,000 BTU.
It also amounts to 0.561×10³³ eV (electron Volts).
November 12th, 2021 at 9:18 am
I’ve been wanting to quantify the entropy of permutations. Given some ordered alphabet of unique symbols and a permutation of them, what is the minimum number of moves required to put the permutation back into sorted order?
I’ve been chewing on this problem with no success for a while now, and I finally decided to poke around the internet for some clues. Turns out this isn’t a solvable problem. In fact, it’s apparently NP-hard.
Well, assuming that’s right, it explains my lack of success. 😮
November 13th, 2021 at 11:04 am
In more detail, given an alphabet of, say, [A,B,C,D,E,F], I want an algorithm that will tell me that [B,A,C,D,E,F] requires just one move to re-order, but [F,E,D,C,B,A] requires five, or that [A,C,B,D,F,E] requires two.
Apparently that’s an NP-hard problem, which means it’s somehow similar to the Traveling Salesperson problem.
And that means quantifying the entropy of a sorted collection of CD or books is a much harder proposition than I imagined. (I’ve been using a measure appropriate for bit strings, but I’ve come to realize it’s not the right measure for a sorted collection of unique members.)
I’m thinking of trying to derive some results by generating permutations. First generate all possible permutations with a single move. Then all those with two and so on. That process will generate many duplicates, but those can be merged. It might at least give me a metric with which to gauge how entropy grows in a sorted collection.
March 1st, 2024 at 2:23 pm
[…] Something cool about both is that the derivative of their area or volume turns out to be their circumference or surface area. [See this post for details.] […]
June 28th, 2024 at 7:33 pm
[…] for the circumference of a circle, 2πr, is the derivative of formula for its area, πr² [see Volume and Surface Area]. That doesn’t work with tau. That said, the ratio of diameter circle to circumference is […]
July 15th, 2024 at 1:06 pm
[…] shows why the formula for the circumference is the derivative of the formula for area (see Volume and Surface Area). It’s because we’re calculating the anti-derivative of that circumference […]