Category Archives: Science
 Yesterday I re-posted (with a few small edits) a Substack post from last September about my basic metaphysical stance: physicalism and realism. I’d posted here about the latter back in 2018 [see Realism], but the more recent Substack post reflects eight more years of thought on the matter.
Yesterday I re-posted (with a few small edits) a Substack post from last September about my basic metaphysical stance: physicalism and realism. I’d posted here about the latter back in 2018 [see Realism], but the more recent Substack post reflects eight more years of thought on the matter.
My view has evolved some without really changing. I’m still committed to physicalism and realism. Nothing I’ve learned or heard argued has persuaded me towards idealism or anti-realism.
In this re-post I’m focusing on a couple of philosophical topics that have gotten a little under my skin:
Continue reading
4 Comments | tags: color, idealism, physicalism, realism | posted in Philosophy, Science
 During the two years that I was active on Substack I never managed to quite find my “voice” there. I never fixed on exactly what I wanted my Substack blog to be beyond being just a version of this one. That ended up feeling like a dilution.
During the two years that I was active on Substack I never managed to quite find my “voice” there. I never fixed on exactly what I wanted my Substack blog to be beyond being just a version of this one. That ended up feeling like a dilution.
With a view towards re-concentrating my efforts, I decided to reprise (with minor edits) some of my Substack posts here. I started this last month with The Noise is Deafening, and I’ve got two more somewhat related posts for this week.
The first one is an elucidation of my basic metaphysical stance:
Continue reading
3 Comments | tags: idealism, physicalism, realism | posted in Philosophy, Science
 It has been a minute or two since the last Science Notes — this subset of Friday Notes where I share bits and pieces of science news that have caught my eye.
It has been a minute or two since the last Science Notes — this subset of Friday Notes where I share bits and pieces of science news that have caught my eye.
In fact, the last of these was back in October, and the reason I didn’t post sooner was that not many articles have caught my eye since. In part because I’ve found myself skipping more and more articles due to lack of interest.
I fear it’s also in part because science has become so broken these days, so lost in fantastical speculation that I’ve begun skipping articles in which the word “might” or “could” plays a prominent role.
Continue reading
Leave a comment | tags: beer, conservative, education, liberal, Science Notes, sleep | posted in Friday Notes, Science
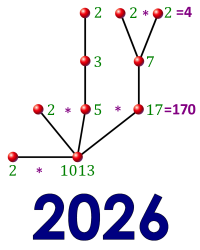 Something old and something new collided last week in a way that I found very engaging. The old was a science fiction series I read long ago, the Heechee saga by Frederik Pohl (1919-2013). What’s relevant here is that the alien Heechee used a number system based on prime numbers.
Something old and something new collided last week in a way that I found very engaging. The old was a science fiction series I read long ago, the Heechee saga by Frederik Pohl (1919-2013). What’s relevant here is that the alien Heechee used a number system based on prime numbers.
The new was this recent Substack post by Richard Green, a math writer and teacher. It, too, features a system based on primes, and I realized it solves a problem that has long bothered me about the putative Heechee number system.
Let me explain…
Continue reading
2 Comments | tags: Frederik Pohl, Heechee, prime numbers, science fiction books | posted in Math
 Recently, I learned an interesting new math trick involving what are known as dual numbers. These are compound numbers similar in form to complex numbers but with a different kind of “magic” element enabling their behavior.
Recently, I learned an interesting new math trick involving what are known as dual numbers. These are compound numbers similar in form to complex numbers but with a different kind of “magic” element enabling their behavior.
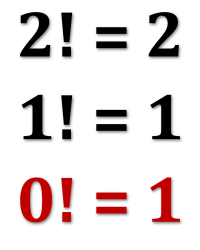
What makes them interesting to people like me is the surprising way they provide a fast and easy technique for software to generate the derivative of a given function.
As an unrelated bonus, a simple explanation of why zero-factorial is equal to one rather than zero (which might seem more intuitive).
Continue reading
1 Comment | tags: computer programming, derivatives, dual numbers | posted in Computers, Math
 Time for another Mandelbrot Monday. I’ve mentioned before that aimlessly playing around with Mandelbrot zooms gets old fairly quickly. I find that I do it for a little while, lose interest for a long while, and then pick it up again for a little while.
Time for another Mandelbrot Monday. I’ve mentioned before that aimlessly playing around with Mandelbrot zooms gets old fairly quickly. I find that I do it for a little while, lose interest for a long while, and then pick it up again for a little while.
I’m in the lost interest phase right now — have been for a couple of months. I think I’ll cool my jets until May, when I’m planning a series of posts (“Mandelbrot May”) exploring the Mandelbrot set and how images of it are made.
But I still have images from previous phases to share, so off we go…
Continue reading
Leave a comment | tags: Mandelbrot fractal, Mandelbrot Monday, Ultra Fractal | posted in Math
 One of the Substack blogs I follow, A Piece of the Pi by Richard Green, is almost ideal from my point of view because it features articles that interest me but only — at most — a few a month (so I needn’t strain to keep up).
One of the Substack blogs I follow, A Piece of the Pi by Richard Green, is almost ideal from my point of view because it features articles that interest me but only — at most — a few a month (so I needn’t strain to keep up).
Which matters because keeping up with dozens of science and math blogs, video channels, and occasional papers takes considerable time away from various hobby projects. But sometimes (and this is the third time Mr. Green has done this) something captures my imagination and sends me off on a tangent.
The results often seem worth sharing, and this is no exception. The delight here is that such a simple idea results in a variety of interesting patterns.
Continue reading
6 Comments | tags: computer generated images, Mary Everest Boole, Python | posted in Computers, Math
 This post begins with a bit of what I see as good news. We’re exactly one month away from Winter Solstice — December 21st at 15:03 UTC. That’s 9:03 AM USA Central Time, and I set posts to publish at 9:14 AM, so by the time you read this, it’s just under a month away.
This post begins with a bit of what I see as good news. We’re exactly one month away from Winter Solstice — December 21st at 15:03 UTC. That’s 9:03 AM USA Central Time, and I set posts to publish at 9:14 AM, so by the time you read this, it’s just under a month away.
Cue regular Solstice-Equinox reminder that the day-length changes very slowly at the Solstices and very rapidly at the Equinoxes [cue regular link: Solar Derivative].
Until then, here’s another edition of Friday Notes.
Continue reading
5 Comments | tags: AI, Bentley, eagle, equinox, Python, snow, Solstice, squirrel, weather | posted in Computers, Friday Notes, Math
For two weeks I’ve indulged in intense 12+ hour days on a self-education project in Python and its Tk module. I plan to write more about that later this week (that’s the plan, anyway).
Intense coding and learning take me deep into a Zen-like mindset that’s hard to emerge from. I have a minor self-commitment to publish at least five posts a month but have yet to publish anything this month.
As I struggle to regain the English language, I thought sharing another set of Mandelbrot images offered an easy reentry. The previous post had images from 2019 and 2020. Here are the last of those (and some from 2025).
Continue reading
8 Comments | tags: Mandelbrot fractal, Mandelbrot Monday, Ultra Fractal | posted in Math
In the Friday Notes from last August, I wrote about needing to buy a new laptop. In the September edition of same, I wrote about installing Ultra Fractal 6 on that laptop and shared a few Mandelbrot images I’d made.
I’ve been sharing two or three in Substack Notes every week for “Fractal Friday”, but Notes is a fast-running river in which things vanish downstream almost instantly.
So, I thought I’d start sharing some here on Mandelbrot Mondays, though I don’t plan to make it a regular thing. I am thinking about a series of posts exploring the Mandelbrot, though.
Continue reading
7 Comments | tags: Mandelbrot fractal, Mandelbrot Monday, Ultra Fractal | posted in Math













