Tag Archives: 3D
 Four years ago I started pondering the tesseract and four-dimensional space. I first learned about them back in grade school in a science fiction short story I’d read. (A large fraction of my very early science education came from SF books.)
Four years ago I started pondering the tesseract and four-dimensional space. I first learned about them back in grade school in a science fiction short story I’d read. (A large fraction of my very early science education came from SF books.)
Greg Egan touched on tesseracts in his novel Diaspora, which got me thinking about them and inspired the post Hunting Tesseracti. That led to a general exploration of multi-dimensional spaces and rotation within those spaces, but I continued to focus on trying to truly understand the tesseract.
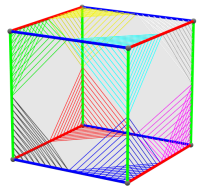
Today we’re going to visit the 4D space inside a tesseract.
Continue reading
5 Comments | tags: 1D, 2D, 3D, 4D, cube, dimensions, square, tesseract | posted in Math, Sideband
 I’ll end these posts about the configuration space metaphor where I began: in a big cube. I started the series in the Neapolitan room, a three-dimensional space where we could indicate our feelings about vanilla, chocolate, and strawberry ice cream with a single marker. From there we visited the Baskin-Robbins 31 Flavors space (which is tasty but beyond our ability to visualize).
I’ll end these posts about the configuration space metaphor where I began: in a big cube. I started the series in the Neapolitan room, a three-dimensional space where we could indicate our feelings about vanilla, chocolate, and strawberry ice cream with a single marker. From there we visited the Baskin-Robbins 31 Flavors space (which is tasty but beyond our ability to visualize).
Then I focused on spaces with only two-dimensions (which are easy to visualize). These are probably the best use of the metaphor; they turn a tug-of-war into a sensible place to stand. They also strongly differentiate “don’t care” from “care about both.”
Now let’s see what we can do with three dimensions…
Continue reading
1 Comment | tags: 3D, 3D space, color cube, configuration space, parameter space, primary colors, secondary colors | posted in Basics
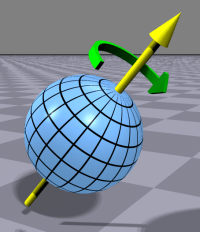 This is a Sideband to the previous post, The 4th Dimension. It’s for those who want to know more about the rotation discussed in that post, specifically with regard to axes involved with rotation versus axes about which rotation occurs.
This is a Sideband to the previous post, The 4th Dimension. It’s for those who want to know more about the rotation discussed in that post, specifically with regard to axes involved with rotation versus axes about which rotation occurs.
The latter, rotation about (or around) an axis, is what we usually mean when we refer to a rotation axis. A key characteristic of such an axis is that coordinate values on that axis don’t change during rotation. Rotating about (or on or around) the Y axis means that the Y coordinate values never change.
In contrast, an axis involved with rotation changes its associated coordinate values according to the angle of rotation. The difference is starkly apparent when we look at rotation matrices.
Continue reading
5 Comments | tags: 2D, 3D, 4D, column vector, matrix math, matrix transform, rotation, rotation matrix, unit vector, vectors | posted in Math, Sideband
Here on the 4th day of the 4th month, I feel I really should be writing about the 4th dimension. I did say that I would during March Mathness, and I tried to set the math foundation here and here.
But two problems: Firstly, I’m kinda burned out. Those three posts were a bit of work, diagrams & models & math (oh, my!), and then trying to explain them clearly. Secondly, obviously no one finds this interesting except me, so not much motivation for the effort involved. Which was expected (kinda the story of my life). I also said these posts were as much recording my notes as attempts to share.
But it is 4/4 (and no Twins game today), so I thought I’d try winging it anyway.
Continue reading
20 Comments | tags: 2D, 3D, 3D space, 4D, coordinates, cube, dimensions, square, tesseract | posted in Science
I’ve been hinting all month about rotation, and the time has finally come to dig into the topic. As mentioned, my interest began with wanting to understand what it means to rotate a tesseract — particularly what’s really going on in a common animation that I’ve seen. What’s the math there?
This interest in rotation is part of a larger interest: trying to wrap my head around the idea of a fourth physical dimension. (Time is sometimes called the fourth dimension, but not here.) To make it as easy as possible, for now I’m focusing only on tesseractae, because “squares” are an easy shape.
After chewing at this for a while (the tesseract post was late 2016), just recently new doors opened up, and I think this journey is almost over!
Continue reading
3 Comments | tags: 2D, 3D, 3D space, 4D, coordinates, cube, dimensions, geometry, line, point, rectangular coordinates, right angle, rotation, square, tesseract | posted in Math

I finally got a round Tuit! [click for big]
For the longest time, I’ve had a note in my workspace to get a round Tuit, and I finally did get a round Tuit. (Even if I had to design and render it myself.)
Continue reading
2 Comments | tags: 3D, ffmpeg, POV-Ray, Round Tuit | posted in Life
 Put on your arithmetic caps, dear readers. Also your math mittens, geometry galoshes and cosine coats. Today we’re venturing after numeric prey that lurks down among the lines and angles.
Put on your arithmetic caps, dear readers. Also your math mittens, geometry galoshes and cosine coats. Today we’re venturing after numeric prey that lurks down among the lines and angles.
There’s no danger, at least not to life or limb, but I can’t promise some ideas won’t take root in your brain. There’s a very real danger of learning something when you venture into dark territory such as this. Even the strongest sometimes succumb, so hang on to your hats (and galoshes and mittens and coats and brains).
Today we’re going after vectors and scalars (and some other game)!
Continue reading
16 Comments | tags: 2D, 3D, azimuth, coordinates, declination, dimensions, direction, elevation, location, scalars, speed, Technology, vectors, velocity | posted in Math
 Last time I focused on how it was possible for Al to see — even enclose in a tunnel — a train that appears shorter to him due to its motion. It turns out that the train Al sees is a stack of time slices of the train at different moments. As we’ve seen, lots of things look different in a moving frame.
Last time I focused on how it was possible for Al to see — even enclose in a tunnel — a train that appears shorter to him due to its motion. It turns out that the train Al sees is a stack of time slices of the train at different moments. As we’ve seen, lots of things look different in a moving frame.
Today I want to say a little about Em’s point of view, run some numbers, and take you through a little math (just one equation, I promise). Then, because it’s Friday (when I try to write about light), I’ll introduce you to light cones.
They’re not actually necessary, but they’re kinda cool.
Continue reading
4 Comments | tags: 2D, 3D, gamma factor, gamma term, light, light cone, light speed, line of simultaneity, plane of simultaneity, simultaneity, simultaneous events, space-time, Special Relativity, surface of simultaneity, time-space diagram | posted in Physics
 The main topic this week was how simultaneity is relative to your frame of reference. How there are (virtual) lines of simultaneity where all points on some line — at all distances from you — share the same moment in time. For any instant you pick, that instant — that snapshot — includes all points in your space.
The main topic this week was how simultaneity is relative to your frame of reference. How there are (virtual) lines of simultaneity where all points on some line — at all distances from you — share the same moment in time. For any instant you pick, that instant — that snapshot — includes all points in your space.
A line of simultaneity freezes the relative positions of objects at a given moment — which enables distance measurements. Simple example: When their watches both read 12 noon, Al and Em were 30 miles apart. A more mathematical example uses x, y, & z (& t), but it amounts to the same thing: a coordinate system.
The gotcha is that simultaneity and coordinate systems are relative when motion is involved!
Continue reading
5 Comments | tags: 1D, 2D, 3D, Albert Einstein, Emmy Noether, frame of reference, Galilean invariance, light, light clock, light cone, light speed, line of simultaneity, simultaneity, simultaneous events, space-time, Special Relativity, surface of simultaneity, time-space | posted in Physics
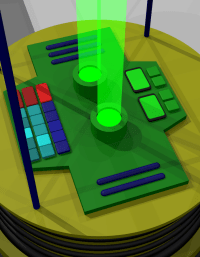
 A couple of readers have asked about the diagrams in this series of Special Relativity posts. I created them with the freeware 3D ray tracing application, POV-Ray. The diagrams are actually three-dimensional “scenes” designed to be viewed as flat pieces. If some of the “dots” look more like little spheres, that’s because they are!
A couple of readers have asked about the diagrams in this series of Special Relativity posts. I created them with the freeware 3D ray tracing application, POV-Ray. The diagrams are actually three-dimensional “scenes” designed to be viewed as flat pieces. If some of the “dots” look more like little spheres, that’s because they are!
I wrote some introductory posts a while ago (here, here, and here). You can read those if you want more details about the application.
For a little (optional!) Friday fun, I thought I’d share some POV-Ray images that have a bit more “dimension” to them.
Continue reading
7 Comments | tags: 1D, 2D, 3D, 3D images, Emmy Noether, light, light speed, POV-Ray, ray tracing, space-time, Special Relativity, time, time-space diagram | posted in Physics













