 I’ve been hinting all month about rotation, and the time has finally come to dig into the topic. As mentioned, my interest began with wanting to understand what it means to rotate a tesseract — particularly what’s really going on in a common animation that I’ve seen. What’s the math there?
I’ve been hinting all month about rotation, and the time has finally come to dig into the topic. As mentioned, my interest began with wanting to understand what it means to rotate a tesseract — particularly what’s really going on in a common animation that I’ve seen. What’s the math there?
This interest in rotation is part of a larger interest: trying to wrap my head around the idea of a fourth physical dimension. (Time is sometimes called the fourth dimension, but not here.) To make it as easy as possible, for now I’m focusing only on tesseractae, because “squares” are an easy shape.
After chewing at this for a while (the tesseract post was late 2016), just recently new doors opened up, and I think this journey is almost over!
Certainly it’s time to record my notes. (Always a bit poignant; lots of dross gets tossed, but it’s still work product even if it was a distraction or blind alley.)
Happily, I’ve achieved a goal: I can (mathematically) explain this:
Which is an animation I made of a tesseract undergoing three different axes of rotation. The colors, red, green, blue, purple, represent the (initial) x, y, z, and w, axes, respectively.
The model is based on ones I’d seen over the years. Easy enough to create, but understanding the creation was another matter. What’s really happening?
§
Unsurprisingly, understanding requires some background.
This may take a few posts! I’ll start by filling in some details on what I’ve already mentioned.
§
Firstly, regarding four dimensions, of which the fourth is not time.
One would be forgiven for being confused. I have written plenty here about four-dimensional spacetime, also known as Minkowski space.
Just recently I wrote about the spacetime interval, and you may recall that distance along the time dimension is subtracted from distance along the physical dimension(s). That’s what makes a Minkowski space different from a Euclidean space.
A Euclidean space is strictly physical (distances are strictly Pythagorean).
 Edwin Abbott’s Flatland is famously about trying to visualize the third dimension from the perspective of two and, by extension, trying to visualize the fourth dimension from our three.
Edwin Abbott’s Flatland is famously about trying to visualize the third dimension from the perspective of two and, by extension, trying to visualize the fourth dimension from our three.
It ain’t easy, but here’s maybe one way to think of it:
If you move so you look at a 1D line along its axis, all you see a 0D point. Move to look at a 2D square along either of its axes, all you see is a 1D line. Look along any axis of a 3D cube, all you see is a 2D square.
When we look along an axis, we can’t see points along that axis. The coordinate values in that axis no longer have any meaning.
So, the fourth dimension, the w axis, which is defined as perpendicular to x, y, and z, can be thought of as an axis we always look along and, thus, cannot actually see.
No matter which direction you turn your head, you’re still looking along the w axis.
Think of the Flatland people asked to consider the third dimension, the z axis. No matter how they orient their sight, they can never see the axis; it’s always perpendicular.
We have the same problem: trying to imagine something that is both along our line of sight and perpendicular to it. But I find the “along” metaphor helpful.
§
Secondly (details, filling in of), I called a tesseract a “square” and said that squares were easy shapes to work with.
 In the tesseract post, I described a process for using an existing “square” shape to create a new “square” shape with an additional dimension.
In the tesseract post, I described a process for using an existing “square” shape to create a new “square” shape with an additional dimension.
The process starts with a single point (zero dimensions) and creates, respectively, a line, a square, a cube, a tesseract, and as many more as desired.
They are (unit) “squares” because: (1) All their edges meet the vertices at right angles. (2) All edges are the same length. (3) That length is two units, essentially 2R, so the generated shapes are the square equivalent of unit circles or spheres.
[I feel like that last bit needs explaining: The distance from the origin (center) to the shape’s edge along any axis is one (unit; one inch, one mile, one whatever). The axis goes in both directions from the center, so the shape’s width along any axis is two. Unit circles are the same: origin to edge, the radius of a circle, is one; the diameter is 2R.]
What makes squares “easy” shapes is all that unit regularity and right angles. It simplifies trying to wrap your head around four dimensions.
Circles (2D), spheres (3D), and 4D “spheres” are also easy shapes, but I’ve found tesseracts more interesting.
§
Finally, a few words about that animation.
It goes through three different modes of rotation — the three “interesting” ones of the six possible proper rotations for a 4D object.
(A “proper” rotation doesn’t change the orientation of parts with respect to each other. An “improper” rotation does, as if it reflected the shape in a mirror.)
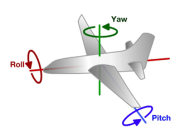 The other three modes are the same three rotations we might apply to a 3D cube — the familiar rotation on the x, y, or z, axis. Good old pitch, yaw, and roll.
The other three modes are the same three rotations we might apply to a 3D cube — the familiar rotation on the x, y, or z, axis. Good old pitch, yaw, and roll.
They are all three of the possible proper 3D rotations, and they’re not interesting in 4D, just as rotating a square in 3D isn’t.
The three modes shown in the animation might seem to be, in some fashion, along the x, y, and z, axes, respectively, and in fact I wrote it that way in the video description (as it turns out, I was half right, in a way, but actually completely wrong).
The truth is a bit more complicated and has to do with how we describe a rotation.
§
Which, well past half my self-imposed word count, is where we begin: How to describe (in a casual sense, for now) a rotation?
This, incidentally, will explain why I think four, or more, physical dimensions are a math fantasy. Physically speaking, it seems like three is it. Period.
I say that because, firstly, we can talk about rotating a square without reference to the third dimension, but a full treatment requires three.
In counterpoint, a full treatment of rotating a 1D line does only require two dimensions. Using the third is redundant; it adds nothing. (Adding a fourth doesn’t add anything to treating a square, either.)
Which really only says we need an “extra” dimension to treat both proper and improper rotation. In itself, it doesn’t point to three being special.
But something interesting happens when we rotate something with four dimensions. The punchline is that we need two axes to rotate around.
It’s almost as if rotation is a strictly three-dimensional concept.
§
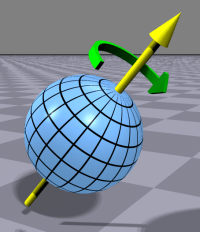
Square rotating on the z axis (which runs into and out of the screen).
Start with a 2D square. Imagine it rotating.
We can describe it as rotating around its center point, with various ways of describing that mathematically, none of which require a third axis.
But, as mentioned, improper rotations — which, despite the name, are perfectly valid — require an additional dimension.
(I originally called such rotations “flips” since they flip the order of things like a mirror reflection.)
So we need a third axis, the z axis.
Which just so happens to intersect the 2D square at its origin, so we can also describe the square’s rotation as being about the z axis.
When we do that, we recognize that all points in the square have a z value (which we’ll assume is zero), and this z value does not change under rotation.
This is a basic rule of rotation: All points orbit, at a constant radius, around the axis of rotation.

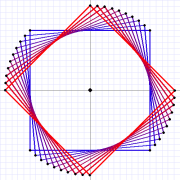
Square rotating in 3D on the x axis, but drawn in 2D. It’s shown to rotate almost 90° here.
When the rotation is parallel to a basis axis of the space (x, y, z…), there is always a coordinate that does not change.
That coordinate matches — and identifies — the axis of rotation (in these restricted cases where the axis is parallel to a basis).
Rotation parallel to the x axis, leaves x coordinates unchanged; rotation parallel to the y axis maintains the y coordinates; and so on.
In the diagram on the right, notice how all the x values stay the same as the square rotates out of the screen.
At 90° — when we’d be seeing it edge-on — it would look like a line. All the y values have been shifted into the z axis, but all the x values remain.
Therefore, we can name the rotation axis by which coordinates don’t change, and this gives us what we intuitively mean by “rotating on an axis” up to 3D. It gets a little weird in 4D.
§
When we rotate a 4D (or higher) object, something kind of funny happens: Now we need more than one axis to describe the rotation.
Here’s a very early version of my rotating tesseract (it has some labeling that might make what it’s doing easier to follow):
One thing to notice: A rotation of 360° returns the cube to its original state.
Unfortunately for my labeling (and my understanding), both here and in the first one, what I called x axis rotation is anything but.
Clearly it isn’t, because things are moving along the x axis. The x coordinates are changing all over the place! So, as it turns out, are all the w coordinates. (We’ll get to that later.)
It turns out that what isn’t changing (in the first rotation mode) are the y and z coordinates. Therefore the first rotation mode is along the yz axes.
Similarly, the second rotation mode is along the xz axes, and the third along the xy axes.
(I’ll get to all this later, too. For now, pay attention to those truncated square pyramids that connect the inner and outer cubes. Notice how the ones not on the line of motion just rotate in place.)
§
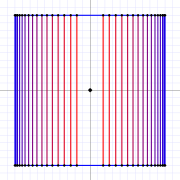
Square rotating in 3D on the y axis, but drawn in 2D. In this case, the y values don’t change, and at 90° the square looks like vertical line.
A final note for now: Rotation of “squares” (of all dimensions) has both a discrete and analog (or linear) aspect.
I mentioned the discrete aspect when I wrote about Emmy Noether and group theory.
When considering just various kinds of 90° rotation, squares become discrete group elements and the fixed rotations operations that can be performed on them.
I’m probably not going to talk much more about that aspect. It doesn’t have much to do with trying to understand tesseractae. (It’s been interesting to explore, and, as I mentioned, group theory is something I want to pursue for other reasons.)
What interests me for now are linear rotations. I want to understand where the points of the square go all along the angles of rotation.
It’s one thing to say that two 90° rotations through the fourth dimension “flip” a cube, but what’s actually happening along the way?
Well, now I know!
Stick with this, and you will, too!
§
Stay square, my friends!














March 27th, 2019 at 2:35 pm
“Which, well past half my self-imposed word count, is where we begin:”
Just out of curiosity, what is your self imposed word count? I generally consider 1000 to be my limit (although it’s not unusual for me to blow past it) and get really concerned if I break 2000. I’ve been doing more short posts lately, but I’ve noticed that it’s really easy for a 150 word post to turn into a 500+ word post.
March 27th, 2019 at 3:04 pm
On a regular post, I shoot for 1200 to 1500, but I’ll allow 1700 or 1800 on more detailed technical posts (all that damn detail). Like you, I get concerned above 2000, although there are a few exceptions.
August 5th, 2023 at 11:58 am
[…] on the 4th day of the 4th month, I feel I really should be writing about the 4th dimension. I did say that I would during March Mathness, and I tried to set the math foundation here and […]