 In the last installment I introduced the idea of a transformation matrix — a square matrix that we view as a set of (vertically written) vectors describing a new basis for a transformed space. Points in the original space have the same relationship to the original basis as points in the transformed space have to the transformed basis.
In the last installment I introduced the idea of a transformation matrix — a square matrix that we view as a set of (vertically written) vectors describing a new basis for a transformed space. Points in the original space have the same relationship to the original basis as points in the transformed space have to the transformed basis.
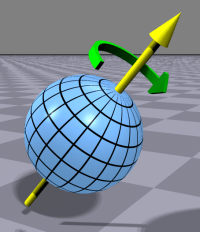
When we left off, I had just introduced the idea of a rotation matrix. Two immediate questions were: How do we create a rotation matrix, and how do we use it. (By extension, how do we create and use any matrix?)
This is where our story resumes…