 Last week we celebrated Albert Einstein’s birthday (he turned 140). Now we need another cake so we can celebrate the other March major mathematician’s birthday — Emmy Noether turns 137 today.
Last week we celebrated Albert Einstein’s birthday (he turned 140). Now we need another cake so we can celebrate the other March major mathematician’s birthday — Emmy Noether turns 137 today.
To my regret, despite that I frequently invoke her name (she co-starred with Albert in the Special Relativity series), her work in mathematics is pretty far above my head, and I’m simply not qualified to write about it. I can say that her work connects mathematical symmetry with physical conservation laws. She also made significant contributions to abstract algebra.
Just recently, I’ve begun to nibble at the edges of the latter in the form of group theory as a part of studying rotation.
Among physicists, Emmy Noether is most notable for her (first) theorem, which connects symmetry with physical conservation laws. For instance, conservation of energy and the conservation of angular momentum both derive from Noether’s theorem.
To quote Wikipedia, that theorem is:
[E]very differentiable symmetry of the action of a physical system has a corresponding conservation law. […] The action of a physical system is the integral over time of a Lagrangian function (which may or may not be an integral over space of a Lagrangian density function), from which the system’s behavior can be determined by the principle of least action. This theorem only applies to continuous and smooth symmetries over physical space.
If you look at the rest of the Wiki page, you’ll see that it gets seriously mathematical very quickly. (Starting with integrals and partial derivatives, both of which are beyond my current grasp.)
That’s about all I can say about this aspect of Noether’s work. Calculus is still mostly a mystery to me!
§
I can keep up a little better when it comes to algebra (at least the more pedestrian forms of it). Noether’s other body of work, the one most notable with mathematicians, is a little more accessible to me.
That said, I’ve only just begun to scratch at the surface of this. Suffice to say it’s a large area of mathematics, just parts of which are deep enough for a lifetime of study (let alone trying to take it all in).
The part of this where I have dipped my toe is called Group Theory.
This, as one might guess, is the study of groups (and operations performed on members of the group).
Obviously, we need to start with what a “group” is (mathematically speaking).
§
We already have a general sense of what a “group” is — a bunch of things we somehow identify as belonging together.
A mathematical group is a specific distillation of that idea. Crucially, it introduces the idea of an operation that can be applied to elements (members) of the group.
Doing so, applying the operator, results in a new element which must qualify as a member of the group. The operation is said to be closed, or the group is said to be closed under the operator.
For example, the integers form a closed group under multiplication.
The operator (multiplication) can be applied to any two elements of the group (of integers), and the result is always another integer.
¶ Another group requirement is an identity element. There must be some element that, when used in the operation with a second element, always results in (a copy of) that second element.
In the integer multiplication group, the number 1 is the identity element. Any number multiplied by 1 is that number. (Under integer addition, 0 is the identity element.)
¶ A group must also have an inverse element. Essentially, this is an element that can generate the identity.
Under integer multiplication, 1/x is the inverse element for x, because multiplying them returns 1, the multiplicative identity.
Under integer addition, -x is the inverse element for x, because adding them returns 0, the additive identity.
§
 What’s really important (and interesting) here is that group theory applies to far more than just integers (or even the reals, which are their own group).
What’s really important (and interesting) here is that group theory applies to far more than just integers (or even the reals, which are their own group).
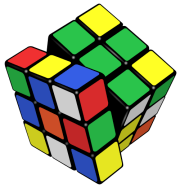
Group theory generalizes — abstracts — a behavior seen in things ranging from quantum particles to Rubik’s Cubes.
This is because we can treat states of a Rubik Cube as elements of a group. For instance, the pristine state, the “solved” state, is one element.
The various twists of the cube are the operator. Twisting the cube gives a new orientation, a new state — an element of the group.
This means group theory connects with permutation mathematics, since we can view states of the Cube as permutations and the operator as a function returning a new permutation.
§
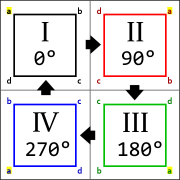
Fig 1. Four (proper) rotations of a square. The order of the corners is preserved.
I’ve been exploring group theory as it applies to something even simpler than twisting a Rubik’s Cube — I’ve been considering the symmetrical rotations of plain old squares, cubes, and tesseracts.
By “symmetrical” I mean rotations of 90° (or multiples of 90°) — rotations that would leave an unmarked object looking the same before and after.
We do mark, or label, the object so we can keep track of the rotation, but on some level, the rotations are symmetrical.
Consider figure 1. It shows four rotations of a square, which we’ll label I, II, III, and IV. They show rotations of, respectively, 0°, 90°, 180°, and 270°, although each represents a 90° rotation from the previous position.
Our group is the four rotations, our elements, and the operator is a 90° rotation, which we can apply successively to generate all four. Note how applying the operator to element IV returns us to element I.
What’s crucial here is that the order of the corner labels (a, b, c, d) does not change. It always winds clockwise around the square.
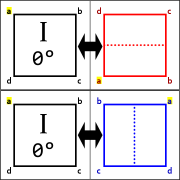
Fig 2. Horizontal (top) and vertical (bottom) “flips” of the square. Note how the corner order is reversed!
In contrast, consider figure 2.
It shows two other (separate) types of operation, that — for the moment — I’ll call flips.
The top example flips the I element along its horizontal (X) axis. The bottom example flips the same I element along its vertical (Y) axis.
In contrast to the (proper) rotation shown above, these operations reverse the order of the corners! Now they wind counterclockwise.
We might also think of a flip as a mirror or reflection operation because of how it reverses the order.
Note that either the red or blue square can be rotated in 90° steps to produce four elements (of which the red and blue squares are two). All four of such elements have reversed corner order.
§
What’s really happening here is that what I keep calling the “proper” rotation turns the square on what would be its Z-axis if the square were described in three dimensions. (In two dimensions, it’s just the center point.)
A proper rotation does not disturb the orientation of the parts. (It’s proper!)
What I called a “flip” is, in fact, a rotation through the third dimension. The first one (red) along the X-axis and the second (blue) along the Y-axis.
But this requires rotating the 2D square through an additional dimension, in this case the Z-axis. (In these diagrams the Z-axis would stick into and out of the screen.)
Since squares don’t have a third dimension (they’re so square), this is called an “improper” rotation, a key effect of which is that it reverses or mirrors parts of the whole.
It turns out there’s kind of a neat mathematics that unifies all this into a wonderfully elegant package that easily and naturally extends to objects in three, four, or more, dimensions.
I’ll get into that (matrix rotation) in future posts!
§
Something that makes this not just an idle exercise for me is that modern quantum theory, a gauge theory, is built on group theory.
If I ever hope to grasp quantum theory, group theory is a prerequisite. (One of many!)
And, if nothing else, in my dotage, it might help keep my mind from turning to complete mush. “Use it or lose it!” (As they say.)
Or not. In any event:
Happy Birthday to Emmy Noether!
Your legacy shines bright! Your work is a foundation of modern physics, and you are revered by mathematicians (and plain math lovers) everywhere. Ya done good!
Stay symmetrical, my friends!













March 23rd, 2019 at 5:00 pm
You can just imagine how long I’ve waited to use that title… 😀
March 24th, 2019 at 2:27 pm
I actually went through through a college calculus course, making an A in it, and came out still not understanding fundamentally what calculus was about. It was decades later that a colleague with an engineering background told me it was about modeling continuous change and its effects.
To this day, I felt like I would have gotten a lot more out of that course if someone had just said that, and talked broadly about what its practical applications were. The problem is that practical applications don’t excite most math teachers, so they tend to assume it won’t excite anyone else. But in my case, if they’d said “space navigation” to me, I would have probably been all over it.
March 24th, 2019 at 6:47 pm
Oh, no doubt! How we teach math is shameful. And our culture is weird; on some level people are often proud they “can’t do math.” Imagine being proud of being illiterate! It’s kinda the same thing, at least in my eyes.
But a huge part of the problem is how it’s taught, especially for women (although that’s thankfully been changing a bit). Teachers rarely instill the sheer beauty and fascination of math. That eerie effectiveness. From what I’ve heard, even quantum physics is usually taught backwards (according to some): students are forced to learn all the ugly, boring, necessary, nuts and bolts before being introduced to the beauty and fascinating. By then many have given up.
People are talking about how it’s pointless to teach mundane calculation when computers do that for us. I think there’s a good territory between knowing basically how your car works and being able to design and build an engine.
There is also that learning math teaches rigor, which people dearly need, but I do agree with a far more holistic approach to understanding math.
“I actually went through through a college calculus course, making an A in it, and came out still not understanding fundamentally what calculus was about.”
Not surprising (although you’d think they would have mentioned something about continuous change — that’s pretty bad).
I took a couple of calc classes through my company (years after college). One huge advantage I had is that I programmed all my homework in BASIC on my C128 and was able to see the equations I was working with. That made all the difference.
For instance, seeing the derivative of a function was awesome. It instantly showed me what was really going on, how it was a graph of how the first curve changed. Made it all so clear!
March 24th, 2019 at 8:27 pm
I think it was Stephen Wolfram who argued that students should first be taught what math is and what you can do with it, including solving some problems using software, and then introduced to the details. Of course, he might have had self interested motives for that position. But I think it’s worth considering.
On my calculus class, I should note that I missed the very first class. (I had a lot of registration problems that semester.) It’s possible the teacher gave an overview then. But if so, that was the only time he would have mentioned it. He was actually a pretty good teacher, but I never recall a big picture discussion of what it was all about.
March 24th, 2019 at 9:10 pm
Yep, I’ve heard the same from Wolfram, and I quite agree. So much of my post-formal-education math is self-sought in the service of trying to understand something. Having the need makes the learning easier; kinda like eating when you’re really hungry.
My parents, when I was an infant, read to me a lot, but never made any effort to teach me to read early. They wanted me to be hungry to learn, and I really was. Reading has always been one of the great joys.
Missing the first day of class can be a killer, but it’s still funny it was never mentioned again. Perhaps it was, by the teacher, considered too obvious to mention. Like mentioning that red means stop while green means go.
March 25th, 2019 at 7:45 am
I suspect that’s an assumption that a lot of math teachers make, that the application is obvious. It certainly wasn’t obvious for me. Of course, maybe if I’d been a little more interested, I might have rooted around in the textbook a bit more and gotten that background. But really, what college student has the bandwidth to do that for every course?
For me, math seemed like a lot of pointless number fiddling that wouldn’t ever be useful for anything. I might have known intellectually it had to be useful for things, but it was never a visceral reality for me.
My parents read to me too, particularly my dad. I think that’s the best way to get a child interested in reading. Allow them to experience the story first without the effort. Oh, you want to experience story while mommy and daddy are busy? Learn to read!
March 25th, 2019 at 11:35 am
Thinking back, by the time I hit high school I was already deep into both science and science fiction, so I already had a sense of the value of math. (It’s almost like that pre-conditioning with reading. It instilled a desired to know math.)
I suppose there’s also that I did find math pretty easy. Anything that was sensible and logical was for me. It’s humans I’ve never been able to parse. I truly do not understand many peoples’ thought process!
March 25th, 2019 at 3:40 pm
The best advice I ever got in terms of people is that everyone is the center of their own world, the hero of their own story, and see things within the filter of their own visceral self interest (albeit inclusive to their family and friends), even if they try hard not to.
Also, the average person is far more worried about how they’re coming off to you than how you are coming off to them. Even if they have no particular reason to need your approval. Even if they’re far more powerful than you.
If you observe people with these principles in mind, a lot of stuff makes sense. (Of course, some people are just cracked.)
March 25th, 2019 at 4:08 pm
Yes, good advice! The corollary is most people don’t care about you nearly as much as you might think. 🙂
That doesn’t help me understand why people have the value systems they do, or make the choices they do. I understand the basic principle of self-interest; it’s the outcomes of how people process it that really puzzle me, sometimes. I wonder what it must be like inside their heads.
That quote from Bernard in Westworld, about the vast size of mental state space, stays with me. Some people seem pretty far away in that phase space from what I can tell. Bernard goes on to say how we (provincially is implied) only regard a narrow subset of those states as “sane.”
It’s interesting to ponder the (has to be) fuzzy boundary between what is definitely sane and definitely insane. Assuming “definitely” ever applies. How far away can one get? (I suppose, ultimately, the real criteria is functionality.)
March 25th, 2019 at 8:01 pm
I guess the other principle that might help is to understand how difficult it is to see things from other people’s perspective. Often what we perceive to be in their best interest is not what they perceive. It’s very tempting to conclude they’re wrong, except we have to remember that our perception is filtered through our own self interests.
On sanity, I think anthropology can provide some insight. That field seems to show that the range of human behavior is vaster than just about anyone is really comfortable with. The sanctioned pederasty of ancient Greece comes to mind, or societies where our version of the nuclear family is non-existent.
But I think you’re right, the question comes down to functionality. Can the person accurately understand reality, be aware of their environment, take care of themselves, or deal effectively with others?
Which leads to the question: what behavior meets the above standard, but we would still consider insane? In other words, what behavior would Bernard see us being provincial about?
March 25th, 2019 at 8:07 pm
In the middle of something, but that is a really neat question; I’ll have to ponder it.
(Bernard, IIRC, meant certain kinds of host behavior and perhaps some of the extreme human behavior, as well. (E.g. The MIB setting out to murder Maeve to see if it made him feel anything.) I think it’s a conversation Bernard had with Elsie in The Forge with some reference to James Delos, I think.)
March 29th, 2019 at 12:48 pm
“Which leads to the question: what behavior meets the above standard, but we would still consider insane?”
It might hinge on the “accurately understand reality” part, which is a heuristic I derived. Remove that from the criteria, and the other points (awareness, self-care, care of others) seem within reach of a mind even if it has a bad reality model.
Like a highly devout believer who hears “the voice of god” but might otherwise manage affairs (more or less) reasonably. My criteria pushes them off-center of sane, but functionality criteria much less so.
I had a co-worker once, nice guy, converted fundamentalist Christian. We used to have great conversations about all sorts of things. It was only the topic of religion that we agreed to disagree on and leave alone.
I would consider his mental model slightly off, but I don’t think any psychiatrist would consider him at all less than sane.
So, from my perspective, yes, there are many states I wouldn’t call (fully) sane, but which are highly functional. (And there’s a whole problem of what, exactly, is the correct “accurate” model of reality, anyway?)
On the functionality criteria alone, “sanity” and “functionality” are linked by definition, so being functional is being sane.
I think we kind of link sanity and morality. One might be highly functional, but utterly immoral, and many might call that insane. Various historical tyrants — and serial killers — can be highly functional, but we diagnose them as psychopaths.
We consider ruthless and lack of emotional connection with others insane, but such behavior can be very successful from an evolutionary standpoint — for the survival of that one organism (and its “friends”). But that seems something of a moral judgement.
As you said, there are interesting examples all throughout anthropology.
It’s an interesting question. Might be worth a post someday. I’ve long wondered about the possible connection between high intelligence and morality. A morality-sanity connection might be interesting to ponder, especially if there’s a correlation between high intelligence and sanity.
I’ll have to ponder this further…
“…except we have to remember that our perception is filtered through our own self interests.”
Very true.
I’ve always believed the dialectic and rational analysis can help see past much of the personal bias, and being aware of the bias helps to combat it, too. That doesn’t change that different worldviews — different input axioms — result in different outcomes.
March 29th, 2019 at 3:05 pm
One of the people on my team is a devout evangelical. I’m always struck by how much we’re interested in many of the same things, but in his case it’s almost always in service of justifying his worldview. Still, he’s one of the few people I know “in real life” that likes to discuss science and philosophy.
Here’s a question. Was Stalin sane? Or Hitler? What about Mao Zedong? The ruthlessness of these men was unbounded. They seemed prepared to do anything to retain power. Stalin seemed functional, as did Mao. Hitler seemed to lose functionality as time went on.
In some ways, it’s comforting to see them as insane. It makes their actions easier to explain. But all of them had to act tactically and strategically to climb to power. I’m pretty sure no court would accept an insanity plea for their actions.
I agree with your last paragraph. Being carefully rational can help us see through our blind spots. But if we have radically different motivations, no amount of reasoning may bridge the gap. I remember a villain in an old black and white movie exclaiming after the protagonist had turned down a bribe that you couldn’t “reason” with a man who turned down that much money. Within his value framework, the hero’s decision was simply not rational.
March 29th, 2019 at 4:03 pm
“Here’s a question. Was Stalin sane? Or Hitler? What about Mao Zedong?”
Exactly. Calling them “insane” seems morally contextual.
It’s arguable that everything we see in nature, evolution, says they were right. Organisms must do everything possible to survive; morality is not a consideration. (One thing about those guys is they got too big, too greedy, too cruel, so counter-forces rose up in opposition.)
You wrote about Big God societies recently. They seem a response to a need for a moral code to counteract what we see in nature.
“Within his value framework, the hero’s decision was simply not rational.”
Which explains a lot about POTUS45’s view of the world.
April 3rd, 2019 at 9:14 am
Wyrd,
Related to our discussion above about calculus, thought you might find this interesting.
https://www.sciencefriday.com/articles/the-language-of-calculus/
April 3rd, 2019 at 12:56 pm
That was very interesting, yes, thanks! Sounds like a book to add to my Buy List!
(I really need to do more reading… I have several Read Lists (ebooks, paper books, PDF papers) and a Buy List!)
April 3rd, 2019 at 1:02 pm
I know what you mean. One of the many good things about ebooks is that no one can see how much unread stuff I have lying around.
April 3rd, 2019 at 4:23 pm
Ha, yes, good point! True of that folder of PDF files I keep meaning to read, too.
I do like that my ebook reader handles PDF files. I’ve found I’m more likely to read them from a comfy chair on my iPad than I am on my PC screen (despite the much larger size).
April 3rd, 2019 at 8:39 pm
You’re insufficiently lazy 🙂 I read my laptop from my recliner. (Sitting in it right now typing this.)
But I do read books from my phone or iPad, often from the same chair, but sometimes from bed.
April 3rd, 2019 at 10:12 pm
To sit with my laptop I’d have to unplug the 27″ flat screen and forego the external keyboard and mouse, which I do sometimes, but so much of the work I do needs the big screen and better input devices. (I’d originally planned to buy a laptop and a desktop, but so far the laptop is enough. Not sure what I’d do with an iPad, laptop, and desktop system!)
August 5th, 2023 at 12:45 pm
[…] In other words, if we multiply some other matrix by I2, the result is a copy of the other matrix. This is like multiplying a number by 1; the result is a copy of the number. (I mentioned identity elements recently in a Noether post.) […]