 Folded into the mixed baklava of my 2018, was a special mathematical bit of honey. With the help of some excellent YouTube videos, the light bulb finally went on for me, and I could see quaternions. Judging by online comments I’ve read, I wasn’t alone in the dark.
Folded into the mixed baklava of my 2018, was a special mathematical bit of honey. With the help of some excellent YouTube videos, the light bulb finally went on for me, and I could see quaternions. Judging by online comments I’ve read, I wasn’t alone in the dark.
There does seem a conceptual stumbling block (I tripped, anyway), but once that’s cleared up, quaternions turn out to be pretty easy to use. Which is cool, because they are very useful if you want to rotate some points in 3D space (a need I’m sure many of have experienced over the years).
The stumbling block has to do with quaternions having not one, not two, but three distinct “imaginary” numbers.
The Complex Plane (it’s simple)
Quaternions extend the concept of complex numbers, just as complex numbers extend the concept of real numbers, so it helps to start with a review of the complex numbers and the complex plane.
(If you’re reading this, I assume you have some familiarity with numbers, so I won’t get too basic.)
A complex number, c, has the form:

Where c is a complex number, a and b are real numbers, and i is the infamous square root of -1.
(While i might bother some, it turns out to be necessary in basic mathematics. It’s the only way polynomials such as x2+4 can have a root.)
A complex number, with its two parts, can be treated as a two-dimensional XY coordinate:
![\displaystyle{c}=[x, yi]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7Bc%7D%3D%5Bx%2C+yi%5D+&bg=f9fbf9&fg=000080&s=1&c=20201002)
Which means complex numbers are inherently two-dimensional.
To actually plot a complex number, we just ignore the i part and plot the two real number parts as x and y.
What matters here is that the behavior of i creates an interesting property when it comes to multiplication of two complex numbers.
 Specifically, if a complex number is considered as a vector with its tail at the origin (0,0) and the head at the coordinates, then a complex number also has an angle with respect to the axis.
Specifically, if a complex number is considered as a vector with its tail at the origin (0,0) and the head at the coordinates, then a complex number also has an angle with respect to the axis.
Multiplying complex numbers C2 by C1 rotates C2’s angle by C1’s angle. (Assuming C1 is a unit vector — that its magnitude is one.)
So the complex plane allows easy rotation of points around the origin. Just multiply the points by some unit vector complex number with the desired angle.
Quaternions
Complex numbers let us do interesting things on the complex plane; quaternions let us do interesting things in three-dimensional space.
A quaternion looks like this:

Where a, b, c, & d, are real numbers, and i, j, & k, are special “imaginary” numbers (secret sauce).
At first glance, this might make them seem like four-dimensional numbers. Which they are, strictly speaking. But another way to view them is as a real value plus a three-vector:
![\displaystyle{q}={r}+[{xi},{yj},{zk}]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7Bq%7D%3D%7Br%7D%2B%5B%7Bxi%7D%2C%7Byj%7D%2C%7Bzk%7D%5D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
Used like this, the complex numbers give the three-vector some special properties: the ability to rotate points in 3D space.
As with the complex numbers, when actually plotting a quaternion, we ignore i, j, & k, and plot the real numbers, x, y, & z. (Remember, the magic is in the multiplication behavior, which doesn’t ignore the complex parts.)
Complex numbers allow rotation in a plane, and three (interlocked!) rotation planes give us rotations in 3D space.
If you think about how a point in 3D space projects values onto the X, Y, & Z axes, then you can perhaps imagine how a rotation in 3-space projects rotations onto X, Y, & Z (complex) planes.
Secret “Magic Sauce”
Now, here’s where it gets a little weird, and this might be the stumbling block that challenges people about quaternions.
The quaternion complex coefficients, i, j, & k, just like the i used in the complex numbers, each have the property that their square is -1.
Specifically:

Now, if you let that sink in, it almost doesn’t make sense. One gets — or at least I got — the impression that j and k were just placeholder names for i, that all three were the same thing.
That their squares all give -1 sure makes it seem that way.
But it’s not that way. They are completely different magic numbers that share properties with the good old i from complex numbers!
(Focus on the ijk = -1 part to see they have to be different!)
It may help to understand that these are basis vectors — orthogonal axes — on different complex planes. It’s exactly like how X, Y, & Z axes are orthogonal to each other even though they’re all represented by real numbers.
So think of i, j, & k, as three different flavors of “magic sauce” for the X, Y, & Z axes, respectively.
Quaternion Multiplication
 This complicates quaternion multiplication.
This complicates quaternion multiplication.
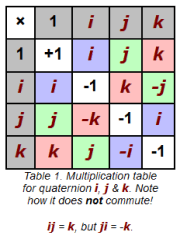
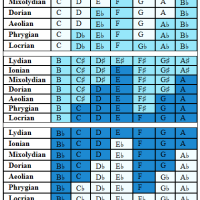
Table 1 (right) shows the multiplication table for quaternions (but there’s an easier way).
A key feature is that multiplication does not commute. (Hopefully, it does compute, though.)
To understand how it works, it’s again helpful to start with complex numbers.
To multiply two complex numbers, c3 = c1 × c2, we do:
c3 = [a, bi] × [c, di] = ac + adi + bci + bdi2 = ac + (ad + bc)i - bd = [(ac - bd), (ad + bc)i]
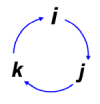
The easy way!
i×j = k
j×k = i
k×i = j
&
j×i = -k
i×k = -j
k×j = -i
Where a, b, c, & d, are all real numbers.
The trick here is that the i2 resolves to -1, which provides a scalar (which is added to the scalar product). Meanwhile the two terms with i add to provide the “imaginary” part of the new complex number.
A similar situation exists when it comes to quaternions. (Only with many more terms and three complex units.)
To multiply quaternions, q3 = q1 × q2, we do:
q3 = q1 × q2 = [a1, b1i, c1j, d1k] × [a2, b2i, c2j, d2k] = a1a2 + a1b2i + a1c2j + a1d2k + b1a2i + b1b2ii + b1c2ij + b1d2ik + c1a2j + c1b2ji + c1c2jj + c1d2jk + d1a2k + d1b2ki + d1c2kj + d1d2kk
Now reduce the i, j, & k, pairs according to the multiplication rules…
q3 = a1a2 + a1b2i + a1c2j + a1d2k + b1a2i + b1b2i2 + b1c2k - b1d2j + c1a2j - c1b2k + c1c2j2 + c1d2i + d1a2k + d1b2j - d1c2i + d1d2i2
And convert any i2, j2, or k2, to -1:
q3 = a1a2 + a1b2i + a1c2j + a1d2k + b1a2i - b1b2 + b1c2k - b1d2j + c1a2j - c1b2k - c1c2 + c1d2i + d1a2k + d1b2j - d1c2i - d1d2
And, finally, collect the like terms:
q3 = (a1a2 - b1b2 - c1c2 - d1d2) + (a1b2 + b1a2 + c1d2 - d1c2)i + (a1c2 - b1d2 + c1a2 + d1b2)j + (a1d2 + b1c2 - c1b2 + d1a2)k
It looks like a mess, but only that final equation matters (I just showed how we got there). It can easily be coded in any (adequate) programming language.
Quaternion addition (or subtraction) is member-wise, so that’s simple.
q3 = q1 + q2 = [a1, b1i, c1j, d1k] + [a2, b2i, c2j, d2k] = [(a1 + b1), (a2 + b2)i, (a3 + b3)j, (a4 + b4)k]
A few other operations, and we’re ready to rotate! But first a quick detour…
Real, Complex, Quaternion, Octonion
Quaternions have all sorts of wonderful mathematical properties (that are utterly beyond me), and they apparently have a strong connection with Special Relativity in being 4D numbers.
Turns out they’re part of a progression of number types we find useful in the real world: natural numbers (ℕ), integers (ℤ), and rationals (ℚ), which got us started with analyzing stuff. Then…
- The reals (ℝ) are necessary in general science.
- The complex numbers (ℂ) are necessary in physics.
- The quaternions (ℍ) are useful in SR (I’m told).
- The octonions (?) might be useful in quantum physics.
What’s fascinating is that the four items listed above are the only division algebras. Each type adds interesting properties, but each also loses something:
- The real numbers aren’t tamed by algebra (because of transcendental numbers).
- The complex numbers aren’t ordered (no sort for multi-dimensional numbers).
- The quaternions aren’t communitive (a×b ≠ b×a).
- The octonions aren’t even associative ([a×b]×c ≠ a×[b×c]).
But what interested me — and which might interest a lot of programmers — is this: How the heck do you rotate something with a quaternion?
Rotating With Quaternions
I can tell you how to make it work; I finally figured out how to cast the spells. But I have absolutely no clue (yet!) as to exactly why it works — I’m a programmer, not a mathematician. (Damn it.)
The short (unhelpful (but bear with me)) version (also the bottom line) goes like this:

P’ is the result of rotating P, the point we want to rotate.
Note that P, in reality an [x, y, z] coordinate, is expressed as the quaternion: [0, xi, yj, zk].
Q is the rotation quaternion, and Q-1 is its inverse.
It was confusing descriptions of this process that made it hard for me to figure out what was really going on. To some extent, it was all the extra information that made it hard to absorb the key aspects.
Once I filtered out the stuff real mathematicians need to know about quaternions, it turned out to be fairly simple.
§
It really does boil down to sticking a [x,y,z] coordinate into a quaternion with its real part set to zero. Then multiply the rotation quaternion by the point quaternion and then by the inverse of the rotation one.
The resulting quaternion has the new [x,y,z] in its vector part. Easy Peasy.
Part of the trick is the rotation quaternion and its inverse.
First pick the rotation vector. Find the [x, y, z] that, as a vector, is the rotation axis. If necessary, normalize it so it’s a unit vector.
Then pick a rotation angle, the number of degrees to rotate whatever is being rotated.
§
As a simple example, assume we want to spin something like a top, about its vertical axis. And let’s say we want to rotate it five degrees (5°) each step.
The unit vector here is simple; it’s just [0,1,0].
Let’s include a second example with a non-orthogonal angle: [+10,-3,+5]. We need to take the unit vector of that: [+0.864, -0.259, +0.432].
Create a rotation quaternion like this:
![\displaystyle{Q}_\textsf{rot}=\!\!\left[\cos\!\!\left(\frac{\theta}{2}\right),{V}_{x}\sin\!\!\left(\frac{\theta}{2}\right),{V}_{y}\sin\!\!\left(\frac{\theta}{2}\right),{V}_{z}\sin\!\!\left(\frac{\theta}{2}\right)\!\right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BQ%7D_%5Ctextsf%7Brot%7D%3D%5C%21%5C%21%5Cleft%5B%5Ccos%5C%21%5C%21%5Cleft%28%5Cfrac%7B%5Ctheta%7D%7B2%7D%5Cright%29%2C%7BV%7D_%7Bx%7D%5Csin%5C%21%5C%21%5Cleft%28%5Cfrac%7B%5Ctheta%7D%7B2%7D%5Cright%29%2C%7BV%7D_%7By%7D%5Csin%5C%21%5C%21%5Cleft%28%5Cfrac%7B%5Ctheta%7D%7B2%7D%5Cright%29%2C%7BV%7D_%7Bz%7D%5Csin%5C%21%5C%21%5Cleft%28%5Cfrac%7B%5Ctheta%7D%7B2%7D%5Cright%29%5C%21%5Cright%5D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
Where Q is the rotation quaternion, V is the rotation vector, and θ is the rotation angle.
For the “spin like a top” example, the rotation quaternion is (notice that the x and z parts are still zero):
![\displaystyle{Q}_\textsf{rot}=\!\!\left[{+0.999048},\,{+0.0}{i},\,{+0.043619}{j},\,{+0.0}{k}\,\right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BQ%7D_%5Ctextsf%7Brot%7D%3D%5C%21%5C%21%5Cleft%5B%7B%2B0.999048%7D%2C%5C%2C%7B%2B0.0%7D%7Bi%7D%2C%5C%2C%7B%2B0.043619%7D%7Bj%7D%2C%5C%2C%7B%2B0.0%7D%7Bk%7D%5C%2C%5Cright%5D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
The second example’s rotation quaternion is:
![\displaystyle{Q}_\textsf{rot}=\!\!\left[{+0.999048},\,{+0.037681}{i},\,{-0.011304}{j},\,{+0.018841}{k}\,\right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BQ%7D_%5Ctextsf%7Brot%7D%3D%5C%21%5C%21%5Cleft%5B%7B%2B0.999048%7D%2C%5C%2C%7B%2B0.037681%7D%7Bi%7D%2C%5C%2C%7B-0.011304%7D%7Bj%7D%2C%5C%2C%7B%2B0.018841%7D%7Bk%7D%5C%2C%5Cright%5D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
§
We also need Qrot-1, the inverse, or reciprocal, of Qrot.
For quaternions, this is defined as: Q* ÷ |Q|2.
That is, the complex conjugate of Q (notated as Q*) divided by the squared norm (aka magnitude, notated as |Q|).
Note that we’re dividing the vector, Q*, by a scalar here, which results in a new vector. (The inverse of a quaternion is a quaternion.)
The complex conjugate of a quaternion, as with a complex number, just inverts the complex parts. For a quaternion, Q* = [a, -bi, -cj, -dk].
The bottom line is that (first example):
![\displaystyle{Q}^{-1}_\textsf{rot}=\!\!\left[{+0.999048},\,{-0.0}{i},\,{-0.043619}{j},\,{-0.0}{k}\,\right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BQ%7D%5E%7B-1%7D_%5Ctextsf%7Brot%7D%3D%5C%21%5C%21%5Cleft%5B%7B%2B0.999048%7D%2C%5C%2C%7B-0.0%7D%7Bi%7D%2C%5C%2C%7B-0.043619%7D%7Bj%7D%2C%5C%2C%7B-0.0%7D%7Bk%7D%5C%2C%5Cright%5D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
…and (second example)…
![\displaystyle{Q}^{-1}_\textsf{rot}=\!\!\left[{+0.999048},\,{-0.037681}{i},\,{+0.011304}{j},\,{+0.018841}{k}\,\right]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%7BQ%7D%5E%7B-1%7D_%5Ctextsf%7Brot%7D%3D%5C%21%5C%21%5Cleft%5B%7B%2B0.999048%7D%2C%5C%2C%7B-0.037681%7D%7Bi%7D%2C%5C%2C%7B%2B0.011304%7D%7Bj%7D%2C%5C%2C%7B%2B0.018841%7D%7Bk%7D%5C%2C%5Cright%5D+&bg=f9fbf9&fg=000080&s=0&c=20201002)
§
Now all we do is carry out the multiplication:

Note that this moves one point one step. To rotate all the points of an object, apply the rotation quaternion to each point.
To rotate an object multiple steps (in a complete revolution, for instance), keep rotating the points. The example above steps 5°, so 72 steps makes a complete revolution.
§
Here’s a great video about quaternions:
And here’s a really cool quaternion explorer and tutorial:
Visualizing quaternions
They are well worth checking out!
Stay rotating, my friends!












January 22nd, 2019 at 10:07 am
I think i just rotated to the point where my head spun off! Laugh. Awesome.
January 22nd, 2019 at 11:05 am
Thanks! 🙂
The holiday season is over, so it’s time to roll up the sleeves and dive into mathematical minutia! (At least I “warn” people by putting them in a Sideband!)
January 22nd, 2019 at 1:50 pm
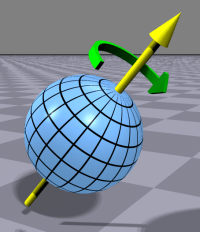
FWIW, I made this movie using a quaternion class I made in Python. The 3D rendering is just a simple transform of XYZ to XY that I wrote to produce the images. The rotation is generated through quaternion multiplication as explained in the post.
The red, green, and blue vectors show the progressive rotation. (Notice how the blue vector and the blue box match.) The gray one just sums the three individual vectors.
January 22nd, 2019 at 1:56 pm
The reason for my interest in quaternions and rotation in 3D space is because I’m studying tesseracts and rotation in 4D space:
Above is a rotating tesseract. It rotates firstly on the X-axis, then on the Y-axis, then on its Z-axis. (This was not done with quaternions. It’s a 3D model I rendered and animated in POV-Ray.)
January 22nd, 2019 at 7:11 pm
Yep. This is why I’ll never be a physicist. (Not to mention a mathematician.) 🙂
January 22nd, 2019 at 7:35 pm
😀 We were talking about the math behind GR recently… this is easier! I’m still chewing on tensors (and finding it a tough go).
As you might know, I’m into 3D rendering (I made that image at the top of the post), and I’ve run into quaternions a few times along the way. I could never make sense of them, and it always bugged me. It was those 3Blue1Brown videos (with some others) that finally did the trick. (I highly recommend 3Blue1Brown for outstanding math visualization videos. One of the best I’ve ever found.)
But I’ve never run into them in any text or video on Special Relativity. They are 4D numbers, so I guess they could be used to plot Minkowski space, but I have no idea how the complex coefficients apply to SR. I keep meaning to do some searching on that.
Don’t know if you’ve heard of Cole Furey and the work she’s doing applying octonions to the Standard Model. As you know, QFT is a gauge symmetry theory, and is entirely mathematical. There is a search for an underlying mathematical framework that gives rise to the SM — you might have heard of Garrett Lisi’s work with the E8 group, a similar pursuit.
She did a video series that’s pretty interesting. A lot was over my head, but what I got from it gave me a lot more insight into the mathematics behind modern physics. If you’re looking to chew on something really meaty, it’s worth a look. Bunch of really short videos.
January 22nd, 2019 at 8:18 pm
Thanks. That video is interesting, but this would be too high a mountain for me to climb right now. I would like to understand the mathematics at some point, but it’ll probably have to wait until after I’m retired.
January 22nd, 2019 at 8:29 pm
It does make a huge difference. Not just the free time, but the freedom from work stress is wonderful!
January 22nd, 2019 at 8:40 pm
I’m definitely looking forward to the freedom from work stress part! I really had a hard time going back after the Christmas break. And the MLK weekend didn’t help. Ah well. 17 months to go!
January 22nd, 2019 at 9:00 pm
Have you made a chain to cut links off or a calendar to mark days off?
January 22nd, 2019 at 9:16 pm
Ha! Not yet. Actually I’m thinking if I dwell on it too much it will feel longer.
January 22nd, 2019 at 10:15 pm
Eye of the beholder, obviously, but it seems to work the opposite way for many. People urged me to do it, which is why I tried it. I liked it.
I think the trick is to set it up so you see a growing pile of days you’ve checked off and a shrinking pile of days left. I just took an image of a calendar and every so often went in an colored out the days behind. Had a link to the image on my desktop, so I could pop it open any time.
On some level you always know how much time there is, but seeing it seems to make it more real than prolonged. But your mileage may vary.
January 23rd, 2019 at 7:51 am
Hmmm. Ok, thanks! I may have to give it a try.
January 23rd, 2019 at 11:21 am
You could have crossed another day off today! 😀
January 23rd, 2019 at 5:51 pm
Today would have been a good one to cross off.
January 23rd, 2019 at 8:29 pm
I had a lot like that near the end.
November 11th, 2021 at 10:51 am
[…] of a version that generates the points, transforms them through a rotation matrix (or using a quaternion) and does the drawing with the transformed points. It’s all just point-to-point lines, so it […]
August 5th, 2023 at 12:45 pm
[…] I mentioned in the Quaternions post, complex numbers are inherently two-dimensional, so they can be interpreted as points on the […]
September 10th, 2023 at 1:52 pm
[…] also have some very technical posts coming that pick up where I left off with Quaternions. (They’ll all be Sideband posts to signal that they’re down in the technical […]